




















1. Introducing the System
• DOK-CONTRL-DDC+MDD+DLC-ANW1-EN-E1,44 • 01.97
9
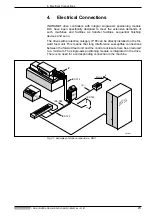
Mounting directly to the
forward feed unit
INDRAMAT drive controllers with integral DLC single-axis positioning
moudle have been especially designed for the requirements of complex
finishing facilities, e.g., transfer systems.
The drive controllers with protection category IP 65 can be directly installed
to the forward forward feed unit. This means that motor power and feedback
cables which are long and conducted through the entire facility thus making
them susceptible to excessive faults are no longer needed.
The forward forward feed unit can be operated as a standalone unit. It can
also be tested independently of the machinery.
Fig 1.3: Mounting directly to the forward forward feed unit
PZtransfer
A1
A2
A1
A2
A1
A2







































































