





























Automated Beverage System
A.B.S. Unit Major Subsystems
© 2004 -2018 The Coca-Cola Company, Cornelius and
McDonald’s Corporation. All Rights Reserved.
30
Cup Grabber Assembly
The cup grabber consists of two cup grabber
arms actuated by a pneumatic cylinder, an ele-
vating mechanism operated by a pneumatic
cylinder, two guide rods, a Travel sensor and a
Cup Empty sensor.
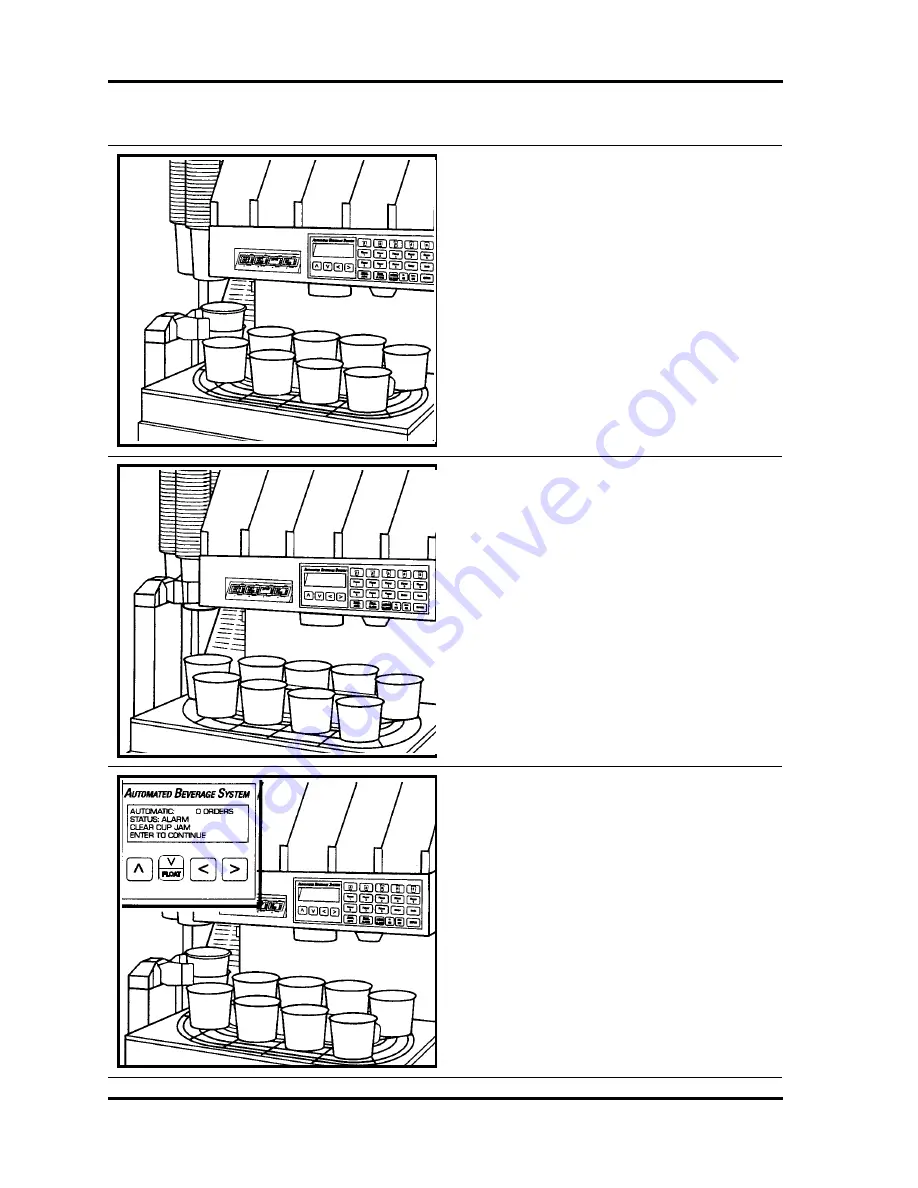
Cup Grabber Cycle
When the correct cup is aligned at the cup grab-
ber, a pneumatic cylinder lifts the cup grabber
to the cup. A sensor detects the full travel of the
grabber during the lift motion. A signal is sent
that the grabber is in position and then a pneu-
matic cylinder closes the grabber arms. If the
arms close fully indicating “No Cup,” the con-
trol system attempts to pull a cup from a second
tube of same size cup if present. If no cup is
available a “SOLD OUT” message is dis-
played. If a cup is available the cup grabber is
lowered and the cup pulled from the cup tube.
If the grabber arms close on a cup but during
the lowering of the cup it falls incorrectly, a
“CUP JAM” message is displayed.
When the grabber successfully pulls a cup
from the cup tube and is completely lowered,
the grabber arms open, dropping the cup into
the conveyor. The conveyor then advances and
continues to make drinks.
Conveyor
Summary of Contents for CORNELIUS AUTOMATED BEVERAGE SYSTEM
Page 2: ......







































































