















CSP
−
902RFM207E
−
1
ROTORCRAFT FLIGHT MANUAL
MD900 (902 Configuration with PW 207E)
Systems Description
Original
7
−
19
Reissue 2
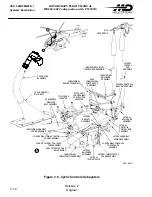
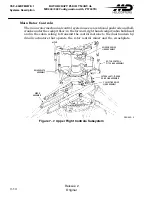
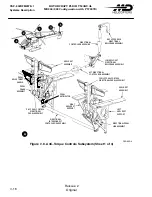
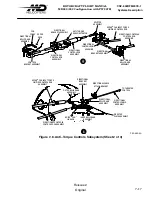
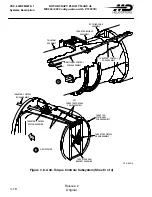
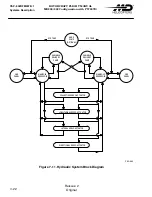
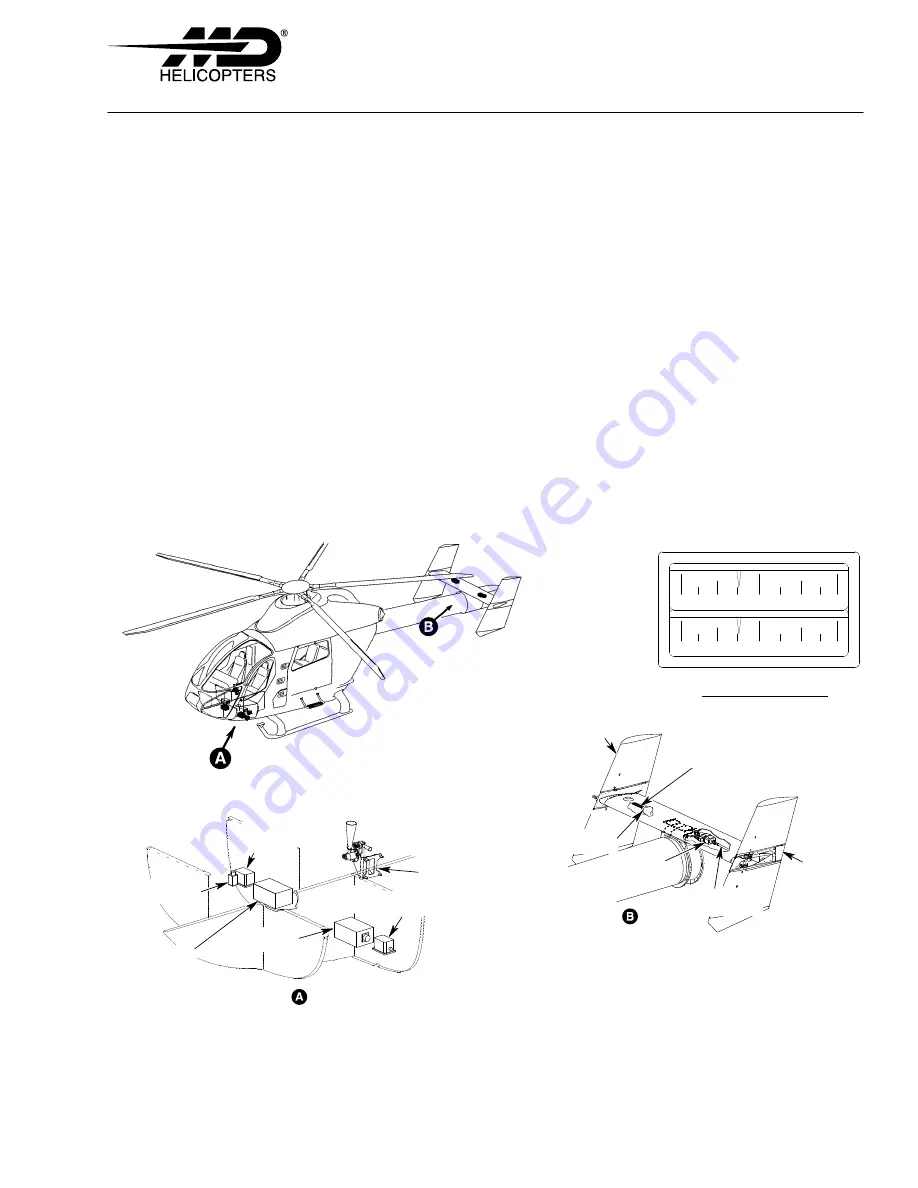
The Vertical Stabilizer Control System
(VSCS) operates the incidence of the
vertical stabilizers through two electro-mechanical actuators, one for the left stabi
lizer and one for the right stabilizer. One portion of the system is a fly-by-wire
actuator of stabilizer incidence as a function of collective pitch stick position. It's
purpose is to provide an anticipation that a power change is occurring to prevent
rotor droop and to maximize the anti-torque contribution of the stabilizers at high
speed thereby minimizing power required by the fan - leaving more power available
for the main rotor. The second portion of the system is a fly-by-wire yaw damping
function that uses yaw gyro/lateral accelerometer signals to impose a supplementary
incidence on both vertical stabilizers. Instrumentation/control includes a dual indica
tor on the instrument panel to show incidence angle of the two vertical stabilizers;
a LEFT STAB FAIL, RIGHT STAB FAIL, or TOTAL STAB FAIL yellow CAUTION
annunciator on the IIDS alphanumeric display; and two OFF/ON/TEST ``L VSCS
R'' switches on the utility panel, and a ``YAW SYNC'' switch located on the collective
control module (Ref. Section IV). The ``YAW SYNC'' switch allows the pilot to reset
the VSCS to operate around the current lateral acceleration and yaw rate. This
feature is useful when transitioning from hovering to forward flight, and when transi
tioning from a turn to level flight or from level flight into a turn.
VERTICAL STAB
L
R
VERTICAL STAB
L
R
VSCS INDICATOR
F92
−
063
LEFT VSCS
CONTROL UNIT
YAW RATE
GYRO
COLLECTIVE
CONTROL POSITION
TRANSDUCERS
YAW
RATE
GYRO
LEFT
VERTICAL
STABILIZER
RIGHT
VERTICAL
STABILIZER
RIGHT LINEAR
ACTUATOR
LEFT
LINEAR
ACTUATOR
RIGHT VERTICAL
STABILIZER LINKAGES
LEFT VERTICAL
STABILIZER LINKAGES
RIGHT LATERAL
ACCELEROMETER
RIGHT VSCS
CONTROL UNIT
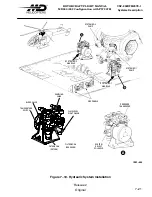
Figure 7
−
9. VSCS Control Subsystem
Summary of Contents for MD900 Explorer
Page 4: ......







































































