

























User Manual
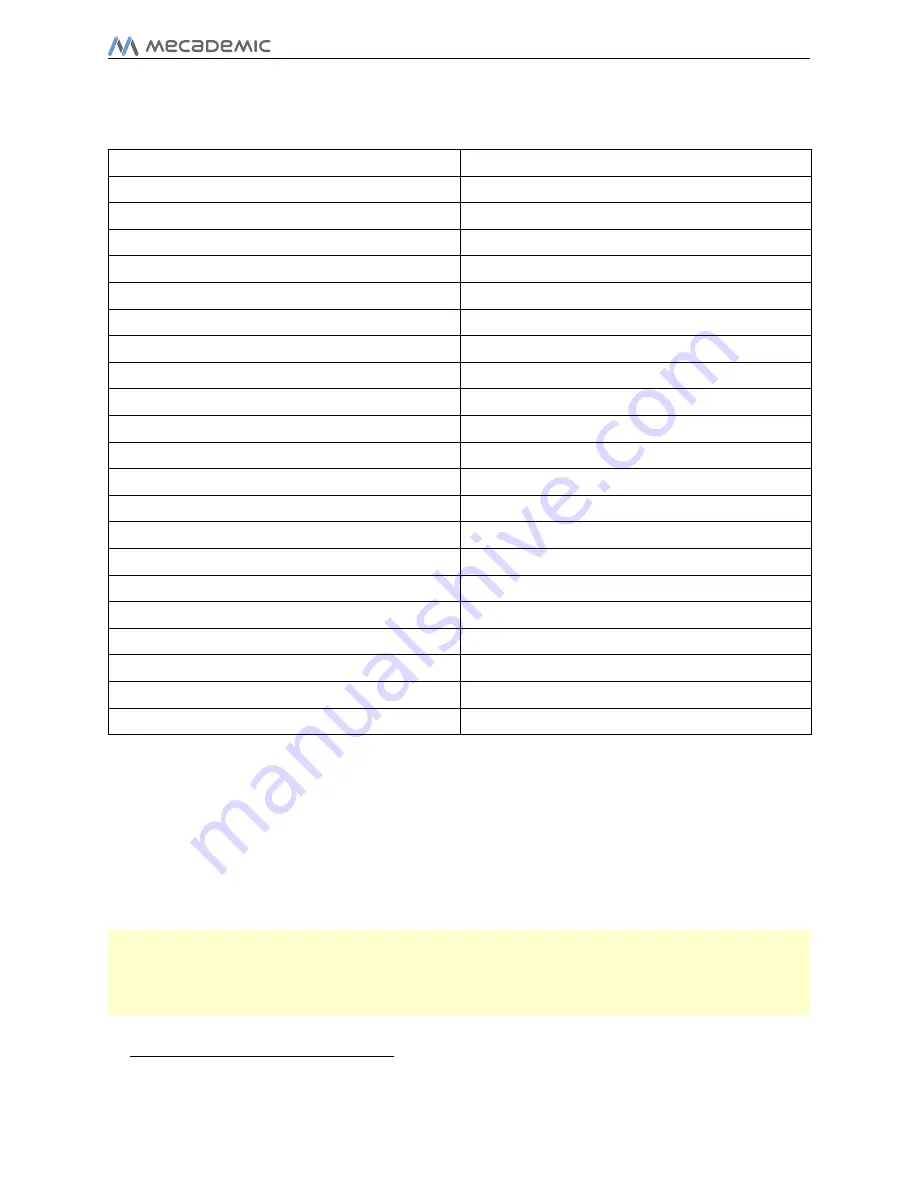
Table 1: Technical specications for the Meca500
Position repeatability
0.005 mm
Rated payload
0.5 kg
Maximum payload
1.0 kg (under special conditions)
Weight of robot arm
4.5 kg
Range for joint 1
[
−
175
◦
,
175
◦
]
Range for joint 2
[
−
70
◦
,
90
◦
]
Range for joint 3
[
−
135
◦
,
70
◦
]
Range for joint 4
[
−
170
◦
,
170
◦
]
Range for joint 5
[
−
115
◦
,
115
◦
]
Range for joint 6
[
−
36
,
000
◦
,
36
,
000
◦
]
Maximum speed for joint 1
150
◦
/s
Maximum speed for joint 2
150
◦
/s
Maximum speed for joint 3
180
◦
/s
Maximum speed for joint 4
300
◦
/s
Maximum speed for joint 5
300
◦
/s
Maximum speed for joint 6
500
◦
/s
Maximum TCP speed
1,000 mm/s
Max.imum power consumption
200 W
Input voltage
24 VDC
Operating ambient temperature range
[5
◦
C, 45
◦
C]
Operating ambient relative humidity range
[10%
,
80%]
(non-condensing)
IP rating
IP 40
6 Installing the Meca500
You are surely eager to start using your Meca500. It is, however, imperative that you x
solidly the base of your robot arm before activating the robot. We typically use metric bread-
boards such as those from
, but you can also use our
for aluminum
T-slotted framing, or even build your entire robot cell at
B
WARNING
Fix securely the robot's base via the mounting holes (Fig. 4a) with four M6
screws, on any at surface of a rigid body.
Do not install any end-effector yet. We will cover this topic in Section 10.
Copyright c
2020 by Mecademic Inc.
Page 7 of 38
Summary of Contents for Meca500
Page 43: ......
Page 44: ...Mecademic Inc 1300 Saint Patrick St Montreal QC H3K 1A4 CANADA ...







































































