





























T
UNING
D-5
In
tr
o
T
u
n
in
g
P
a
ra
m
et
er
s
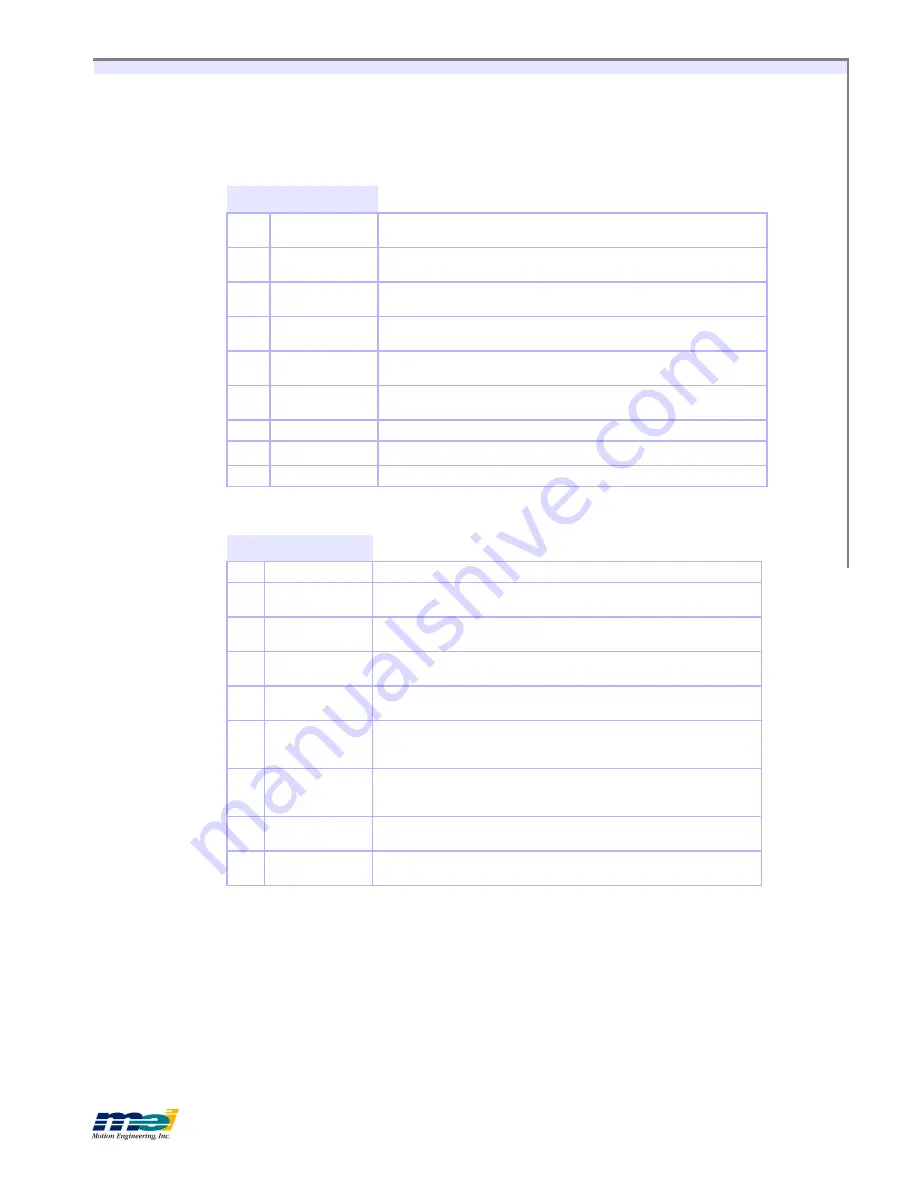
Tuning Parameters
Table D-1
What do Gains Do?
Table D-2
What Problems Do Gains Solve?
Parameter
Kp
Proportional Gain increases/decreases the motor control output
based on the
position error
of the current sample
Kd
Derivative Gain
increases/decreases the motor control output
based on the
rate of change of the position error
Ki
Integral Gain
increases/decreases the motor control output
based on the
summation of position error
over time
Kv
Velocity
Feed-Forward
increases/decreases the motor control output
based on the
command velocity
Ka
Acceleration
Feed-Forward
increases/decreases the motor control output
based on the
command acceleration rate
Kf
Friction
Feed-Forward
Adds a
constant value
to the motor control output when the command
velocity is non-zero.
Ko
Offset (static)
Adds a
constant value
to the motor control output
2
shift
Scale
Scale factor
for the other tuning parameters (Kp, Kd, Ki, Kv, Ka, Ko)
Integration Limit
Limits the
summation of position error
over time.
Parameter
Kp
Proportional Gain Determines the systems’ overall response to
position error
Kd
Derivative Gain
Provides damping and stability for the system by
preventing over-
shoot
Ki
Integral Gain
Helps the system overcome
static position errors
(caused by friction
or loading)
Kv
Velocity
Feed-Forward
Increases the system’s motor control signal based on the command ve-
locity (useful for amplifiers in
velocity mode
).
Ka
Acceleration
Feed-Forward
Increases the system’s motor control signal (current) during accelera-
tion and deceleration (useful for amplifiers in
torque mode
)
Kf
Friction
Feed-Forward
Increases the system’s motor control signal (current) during accelera-
tion and deceleration to overcome static friction (useful for systems
with
large dynamic friction loads
)
Ko
Offset (static)
Compensates for
small variations
in motor control signal due to DAC
and amplifier offsets (also used to compensate for a fixed force, like
gravity
2
shift
Scale
Adjusts the resolution of the gains and feed-forward terms
(via a
scale factor
)
Integration Limit
Prevents the integrator from building up a large integration error
(and consequently
saturating
the motor control signal)
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































