





























T
UNING
D-13
In
tr
o
T
u
n
in
g
P
a
ra
m
et
er
s
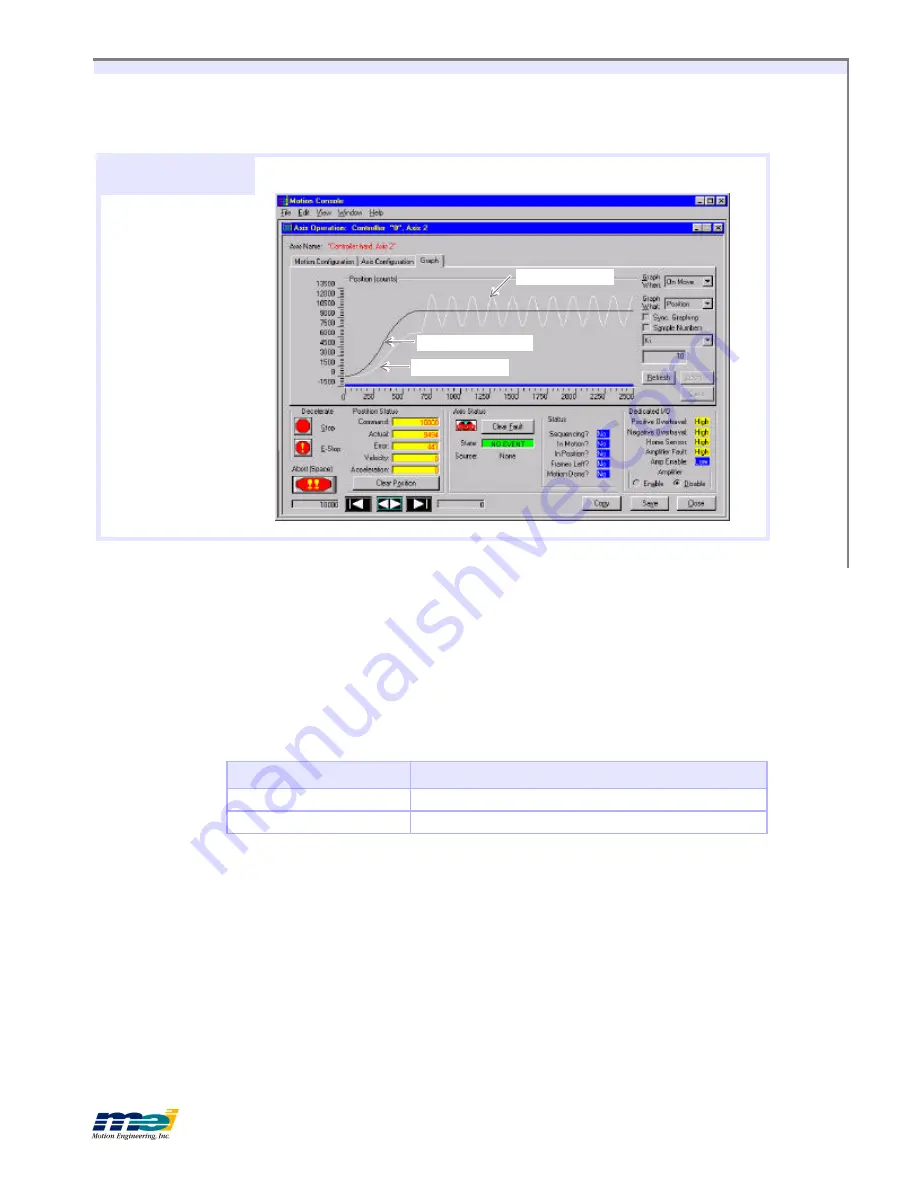
Figure D-8 High Integral Gain (only when standing)
Velocity Feed-Forward (Kv)
The Velocity Feed-Forward increases/decreases the motor control output signal, based on the
command velocity
. The Velocity Feed-Forward term is very important when used with
veloc-
ity-controlled servos
or
closed-loop step motors
.
As the
command velocity
increases, the
position error
increases and a higher output voltage or
pulse rate is needed to reduce the
following-position error
. The Velocity Feed-Forward term
reduces the
following position error
by increasing the controller output voltage proportionally
to the command velocity.
Table D-10
Effects of Velocity Feed-Forward
If Velocity Feed-Forward is
Then
too large
the motor will try to travel ahead of the command position
too small
the system will incur a position-following error
H
IGH
I
NTEGRAL
G
AIN
Oscillation after
Actual Position
Command Position
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































