





























T
UNING
D-14
In
tr
o
T
u
n
in
g
P
a
ra
m
et
er
s
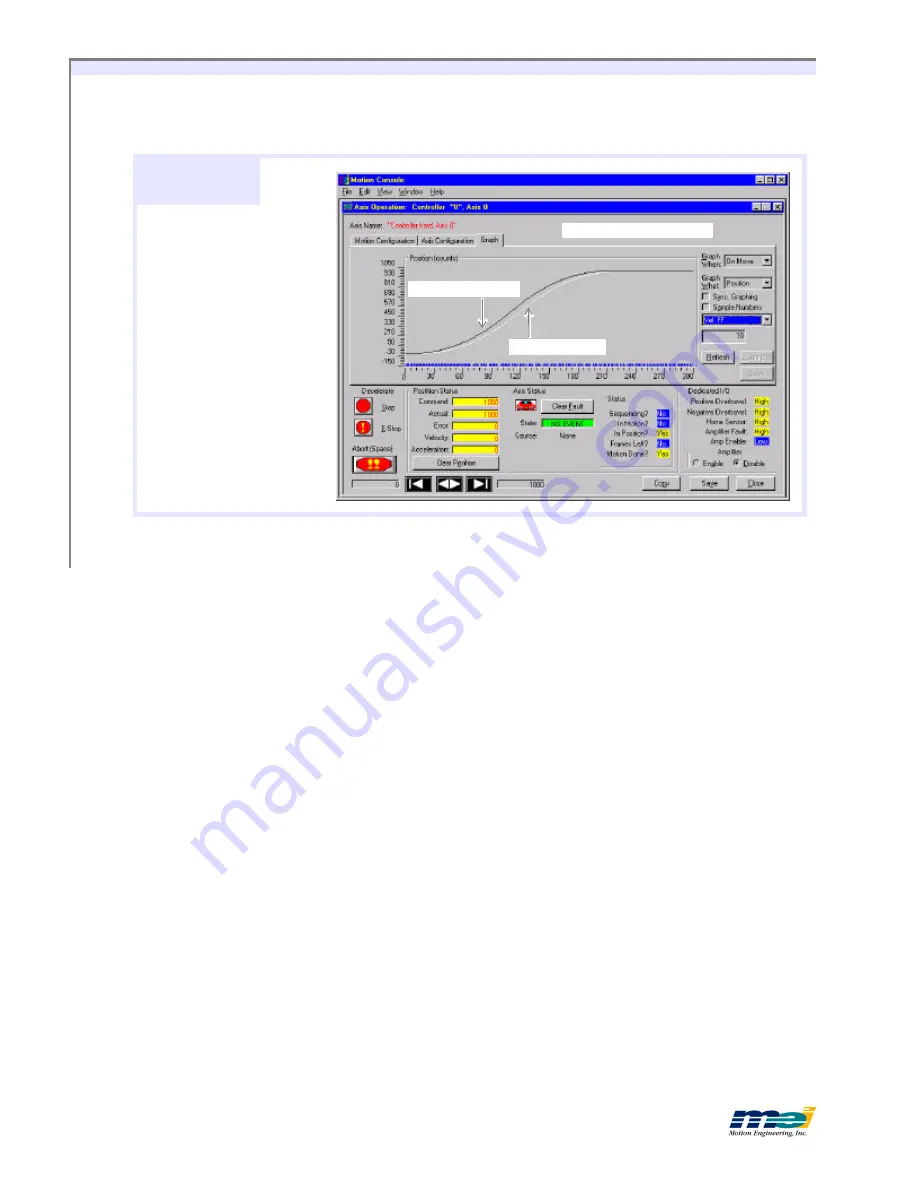
Figure D-9 Insufficient Velocity Feed-Forward
Acceleration Feed-Forward (Ka
)
The Acceleration Feed-Forward Gain (Ka) increases/decreases the motor control output sig-
nal, based on the
acceleration rate
. Acceleration Feed-Forward is used with torque-con-
trolled servos (current). Systems with large inertial loads need more motor current to
accelerate or decelerate than systems with light loads do. The Acceleration Feed-Forward
Gain causes the controller to increase the motor control signals
during periods of
accelera-
tion and deceleration.
Offset (Ko)
The Offset Gain term adds/subtracts a fixed value to or from the motor control output signal.
You typically use the Offset Gain to compensate for small variations in controller DAC out-
puts and amplifier offsets, or to compensate for a fixed force (such as gravity) that is applied
externally to a control system. Note that the internal offset in a DSP controller is
calibrated
at the factory
, so that when the offset is zero, the analog or pulse output is also zero.
If necessary, use the CONFIG program to re-calibrate the analog and step pulse output.
Scale
You use the Scale parameter to adjust the resolution of the PID and feed-forward terms. The
Scale parameter is used to calculate the overall scale factor K
R
(K
R
= 2
scale
). The overall
scale factor scales the
other
tuning parameters.
Decreasing the Scale by 1 will divide the equation for On by a factor of 2. In order to get the
same voltage output from the PID, the gains and feed-forward terms must be doubled, i.e., a
gain of 10 must be changed to a gain of 20. This means that a gain of 9.5 (that before could
not have been entered) can now be entered as 19.
L
OW
V
ELOCITY
F
EED
-F
ORWARD
Position-Following Error
Command Position
Actual Position
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































