





























C
ONNECT
STC
S
TO
A
MPS
/M
OTOR
/E
NCODER
4-15
L
C
, 1
0
4
C
o
n
n
ec
tio
n
s f
o
r D
u
a
l-
L
o
o
p
C
o
n
tr
o
l
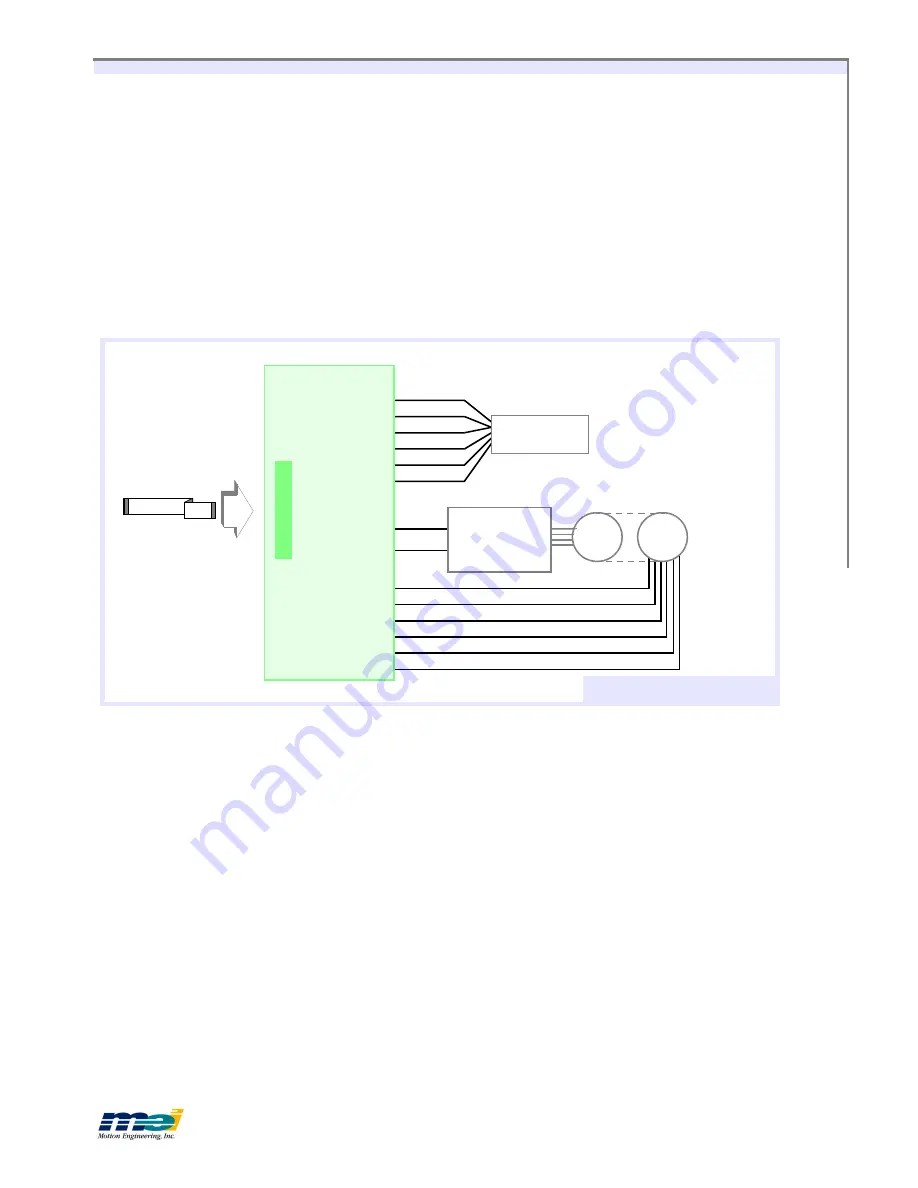
Connections for Dual-Loop Control
DSP Series controllers can be configured for dual-loop control. In dual-loop control, the veloc-
ity information for the PID derivative term (Kd) is derived from a rotary encoder on the motor
shaft, and the position information for the PID proportional and integral terms are derived from
an encoder on the load itself.
The axis that will be used for the rotary encoder is configurable through software and can be
any axis that is not controlling a motor. For example, if axis 0 is configured for velocity feed-
back and axis 1 is configured for positional feedback, your system would be connected as
shown in the next figure.
Figure 4-12
Typical Dual-loop Encoder Wiring with Differential Encoders
STC-50
Position
Brushless
Amp
Motor
Servo +
Encoder A+
Encoder A-
Encoder B+
Encoder B-
Encoder Index+
Encoder Index-
GND -
Encoder A+
Encoder A-
Encoder Index-
Encoder B+
Encoder B-
Encoder Index+
4
8
6
10
12
14
18
16
3
5
7
9
11
13
F
OR
D
UAL
-
LOOP
C
ONTROL
From
104
LC
Encoder
Axis 1
Axis 1
Axis 0
Encoder
Velocity
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































