





























6 Applications
6.2
Positioning process
The servo drive has a table of 256 positions which can be used for the advance
parameterisation of target positions. In addition, there are special position sets for the
fieldbus and jog mode.
6.2.1
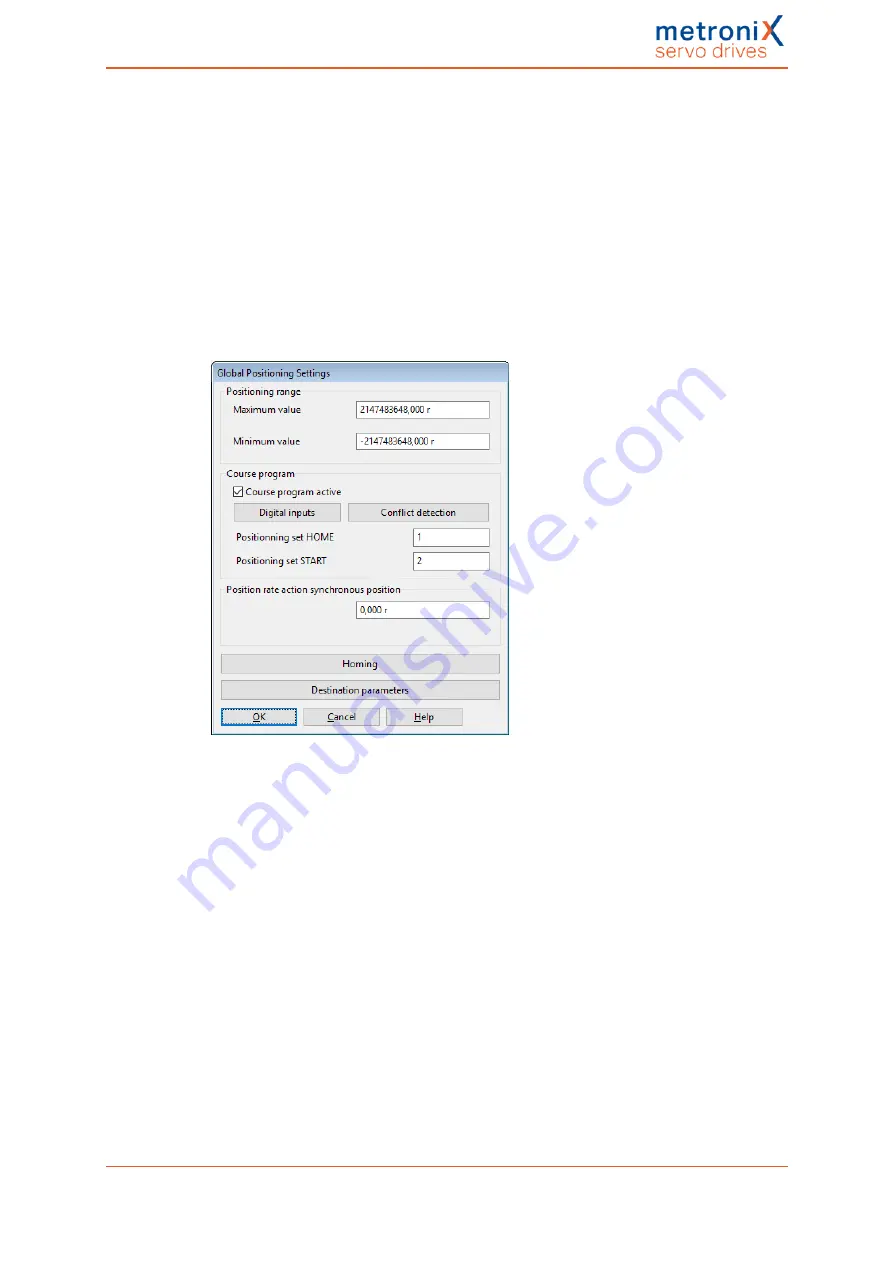
Global positioning settings
For applications in the position-controlled mode and in positioning mode, certain
fundamental parameters must be configured. This is done in the menu
Parameters/Positioning/Global positioning settings
.
Figure 46: "Global positioning settings" window
In the case of absolute positioning runs, the new target position is checked to see whether
it lies between the limits for the absolute positioning range. The parameters
Minimum
and
Maximum
in the field
Positioning range
indicate the absolute position limits for the position
setpoint and actual position. The positioning range always refers to the home position of
the drive (see also section 6.1
The options in the field
Course program
(motion program) are explained in section 6.2.7
on page 97. The buttons
Homing
and
Destination parameters
can be used
to open the associated windows.
Product manual BL 4000-C
Page 86 of 298







































































