





























6 Applications
6.2.7
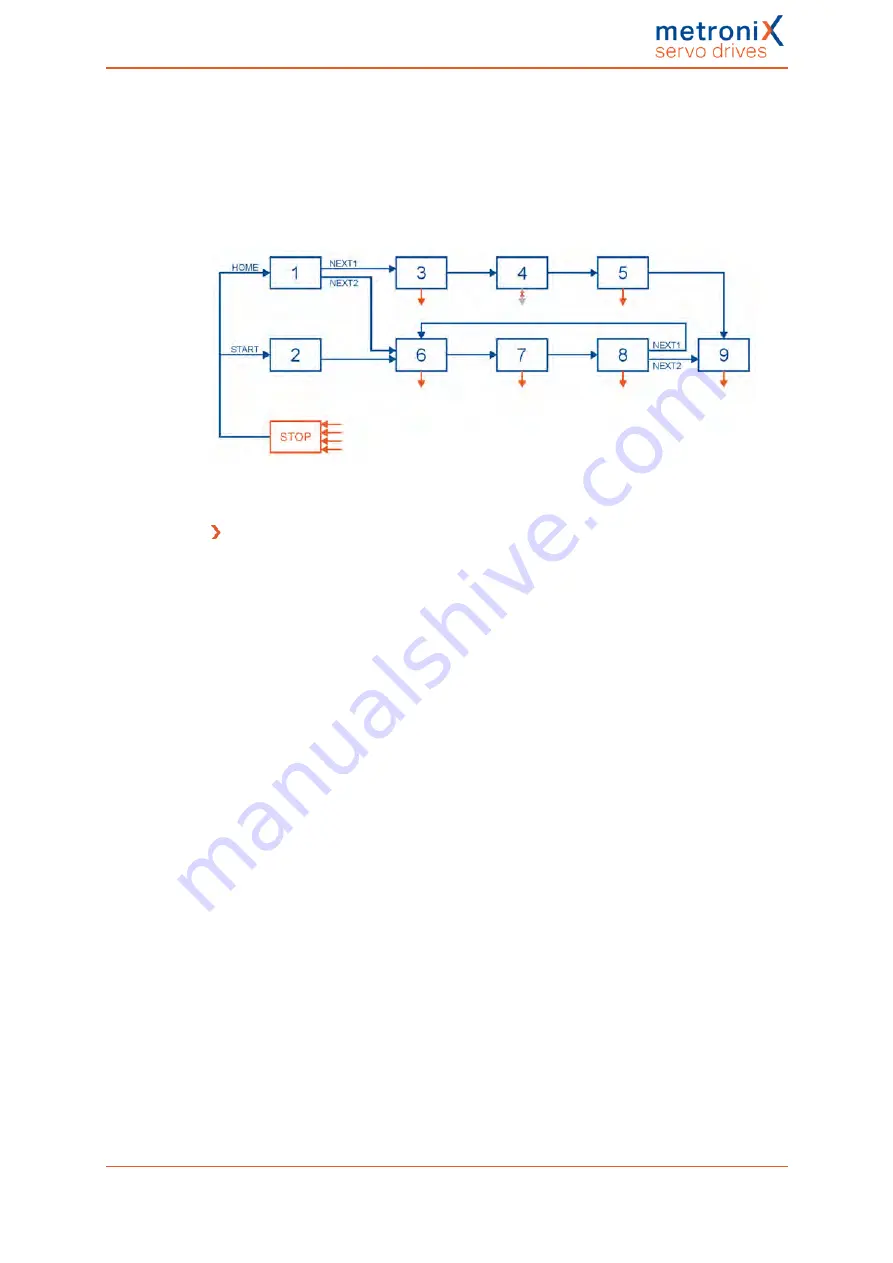
Motion program
A motion program can be used to link several position sets to form a sequence. These
positions will be approached one after the other.
Based on its motion program options, a position set can become part of a motion program.
The result is a linked list of positions:
Figure 54: Motion program
Features:
l
All of the positions can be linked together to form a motion program.
l
Apart from linear sequences, which are terminated sooner or later, circular linking is
also possible.
l
Up to 2 following positions can be set for every step (position) of the motion
program. As a result, branching is possible within a motion program. Branching
occurs depending on the status of the digital inputs (NEXT1, NEXT2).
l
The motion program can control two digital outputs. Three different messages
(target reached, remaining distance message and position set active) are available
for every step of the motion program.
l
A motion program can be started via two default start points (HOME, START) or
directly via the target selector (see section 6.2.6.1
Positioning via digital inputs
page 95). In addition, it can also be started directly via a fieldbus.
l
The motion program can be stopped at any time via a digital input (stop input). This
function can be suppressed for individual specific positions (position 4 in this
example).
l
The motion program can be created and monitored via the parameterisation
interface. The application is saved in the parameter set and can be transferred to
other servo drives.
Product manual BL 4000-C
Page 97 of 298







































































