





























6 Applications
6.1.1
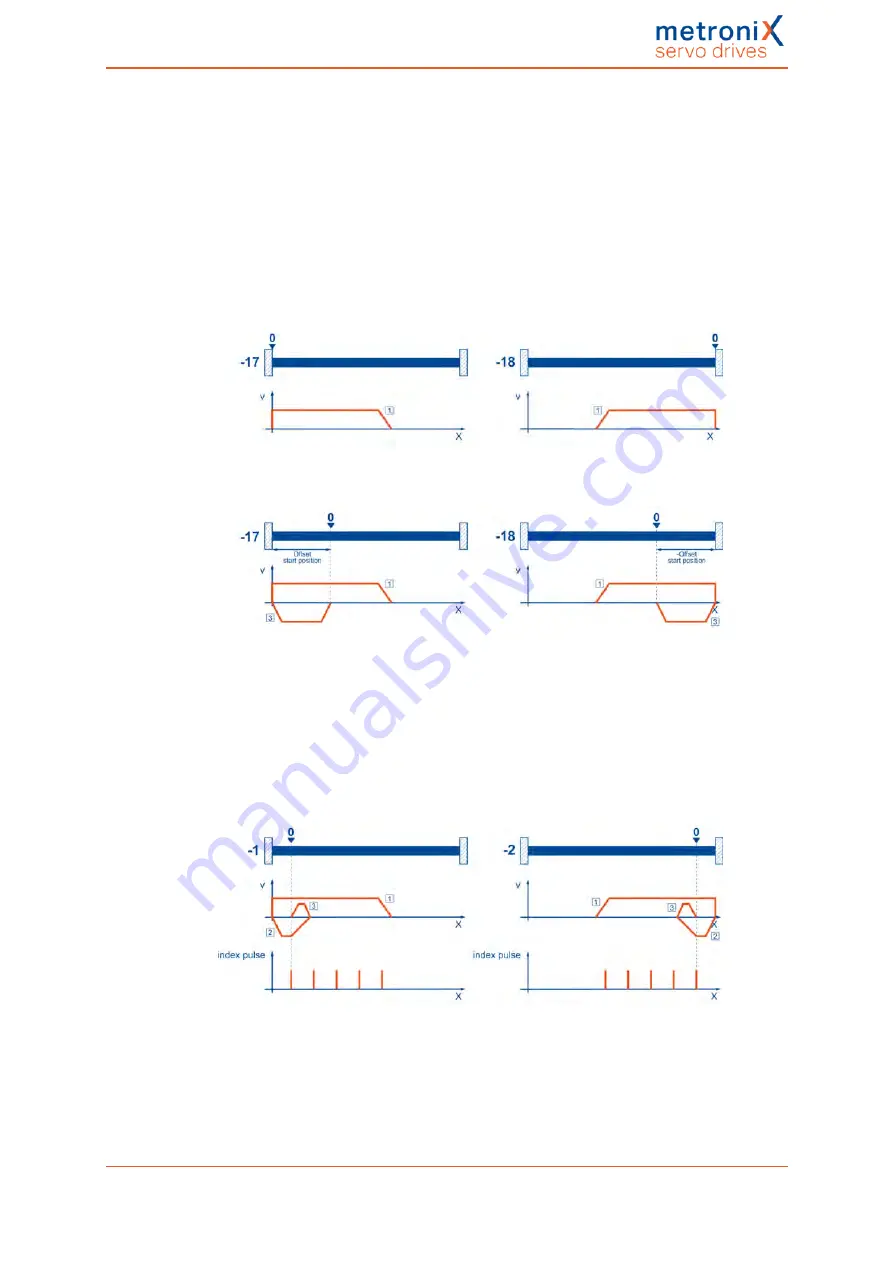
Methods -17 and -18: Stop
If this method is used, the drive moves in the positive direction (-18) or negative direction
(-17) until it reaches the stop. Normally, a 50% increase of the i²t value is used as the
criterion for detecting the stop. Alternatively, a comparison torque value at which the stop
will be considered as detected can be specified (see section 6.1.14
84). The mechanical design of the stop must be such that it cannot be damaged with the
parameterised maximum current. The home position refers directly to the stop. Since, in
this case, the home position would be located directly at the stop, the parameter
Offset
start position
should be used to shift the home position in a suitable manner.
Figure 31: Homing run to the stop
Figure 32: Use of "Offset start position"
6.1.2
Methods -1 and -2: stop with index pulse evaluation
These methods correspond to the methods -17 and -18. However, the home position also
refers to the first index pulse of the angle encoder in the negative (-2) or positive (-1)
direction as seen from the stop.
Figure 33: Homing run to the stop with index pulse evaluation
Product manual BL 4000-C
Page 74 of 298







































































