





























6 Applications
6.2.3
Destination parameters: Settings tab
Parameters/Positioning/Destination parameters
The target positions are parameterised in the menu stated hereinabove. The window
below will be displayed. It includes the tab
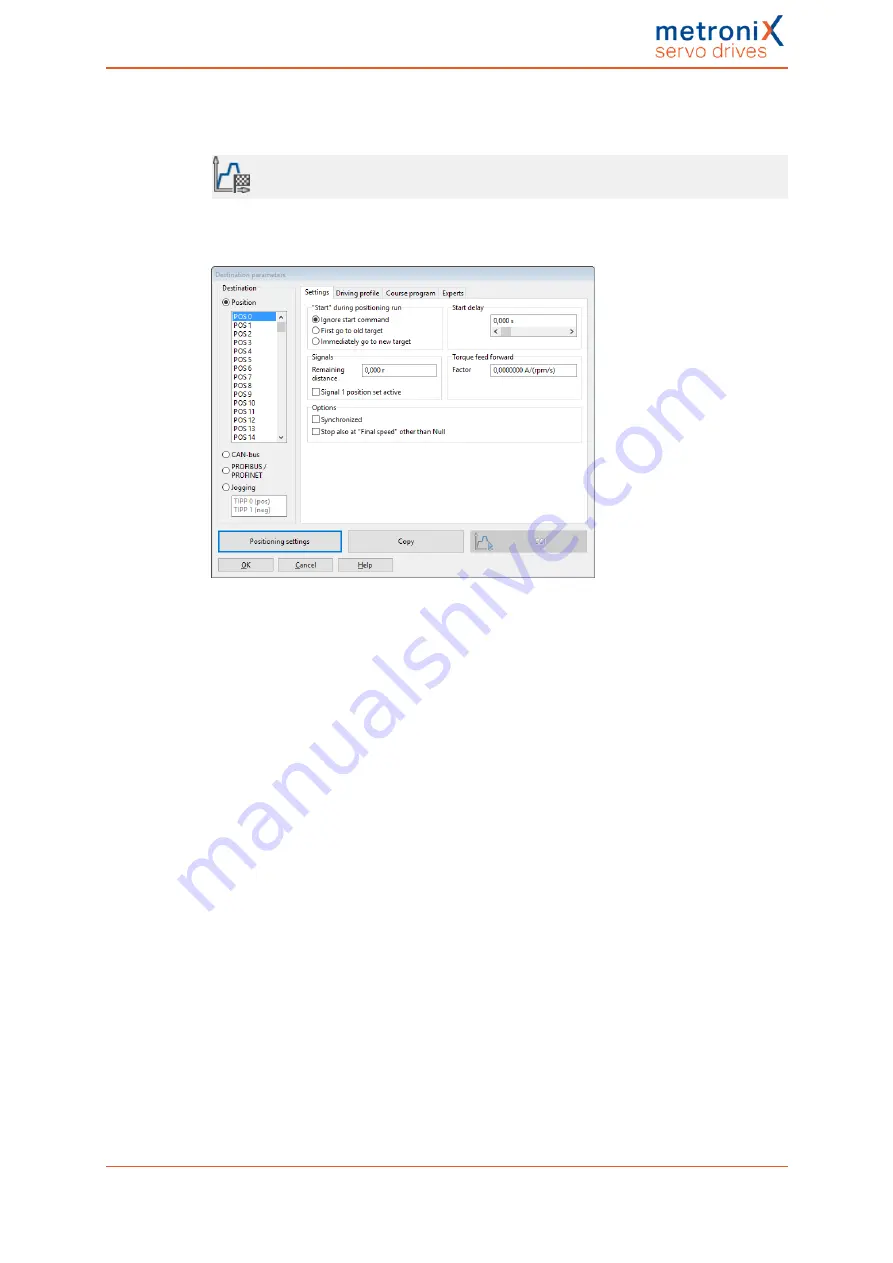
Settings
:
Figure 49: "Destination parameters" window - "Settings" tab
You can select the target position to be parameterised in the field on the left.
The field
Start during positioning run
defines the behaviour of the servo drive if the start
command for a new target position is issued during a running positioning run. It has the
following options:
l
Ignore start command
: The positioning command for the new position cannot be
selected or started until the current positioning run is completed.
l
First go to old target
: The current positioning run will be completed before the new
positioning process is started. The next positioning run can be selected prior to the
running positioning run. The new positioning run will be started automatically when
the current positioning run is completed. If a relative positioning run is started, the
reference position for "relative" usually is the last target position.
l
Immediately go to new target
: The current positioning run will be interrupted, and
the new position will be approached immediately. In the case of a "relative"
positioning run, the reference position for the calculation of the new target position
is the current position setpoint. However, in general, this is not a reasonable
combination. In the case of the option
Relative to last destination
, on the other
hand, the reference position is the (old) target position of the positioning run that
has just been interrupted.
Product manual BL 4000-C
Page 88 of 298







































































