





























2004 Microchip Technology Inc.
Advance Information
DS70119B-page 115
dsPIC30F6010
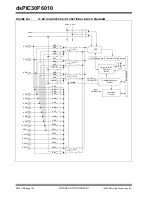
19.0 CAN MODULE
19.1
Overview
The Controller Area Network (CAN) module is a serial
interface, useful for communicating with other CAN
modules or microcontroller devices. This interface/
protocol was designed to allow communications within
noisy environments. The dsPIC30F6010 has 2 CAN
modules.
The CAN module is a communication controller imple-
menting the CAN 2.0 A/B protocol, as defined in the
BOSCH specification. The module will support
CAN 1.2, CAN 2.0A, CAN2.0B Passive and CAN 2.0B
Active versions of the protocol. The module implemen-
tation is a full CAN system. The CAN specification is
not covered within this data sheet. The reader may
refer to the BOSCH CAN specification for further
details.
The module features are as follows:
• Implementation of the CAN protocol CAN 1.2,
CAN 2.0A and CAN 2.0B
• Standard and extended data frames
• 0-8 bytes data length
• Programmable bit rate up to 1 Mbit/sec
• Support for remote frames
• Double buffered receiver with two prioritized
received message storage buffers (each buffer
may contain up to 8 bytes of data)
• 6 full (standard/extended identifier) acceptance
filters, 2 associated with the high priority receive
buffer, and 4 associated with the low priority
receive buffer
• 2 full acceptance filter masks, one each associ-
ated with the high and low priority receive buffers
• Three transmit buffers with application specified
prioritization and abort capability (each buffer may
contain up to 8 bytes of data)
• Programmable wake-up functionality with
integrated low pass filter
• Programmable Loopback mode supports self-test
operation
• Signaling via interrupt capabilities for all CAN
receiver and transmitter error states
• Programmable clock source
• Programmable link to timer module for
time-stamping and network synchronization
• Low power Sleep and Idle mode
The CAN bus module consists of a protocol engine,
and message buffering/control. The CAN protocol
engine handles all functions for receiving and transmit-
ting messages on the CAN bus. Messages are trans-
mitted by first loading the appropriate data registers.
Status and errors can be checked by reading the
appropriate registers. Any message detected on the
CAN bus is checked for errors and then matched
against filters to see if it should be received and stored
in one of the receive registers.
19.2
Frame Types
The CAN module transmits various types of frames,
which include data messages or remote transmission
Requests initiated by the user as other frames that are
automatically generated for control purposes. The
following frame types are supported:
• Standard Data Frame
A Standard Data Frame is generated by a node when
the node wishes to transmit data. It includes a 11-bit
Standard Identifier (SID) but not an 18-bit Extended
Identifier (EID).
• Extended Data Frame
An Extended Data Frame is similar to a Standard Data
Frame, but includes an Extended Identifier as well.
• Remote Frame
It is possible for a destination node to request the data
from the source. For this purpose, the destination node
sends a Remote Frame with an identifier that matches
the identifier of the required Data Frame. The appropri-
ate data source node will then send a Data Frame as a
response to this Remote request.
• Error Frame
An Error Frame is generated by any node that detects
a bus error. An error frame consists of 2 fields: an Error
Flag field and an Error Delimiter field.
• Overload Frame
An Overload Frame can be generated by a node as a
result of 2 conditions. First, the node detects a domi-
nant bit during lnterframe Space which is an illegal
condition. Second, due to internal conditions, the node
is not yet able to start reception of the next message. A
node may generate a maximum of 2 sequential
Overload Frames to delay the start of the next
message.
• Interframe Space
Interframe Space separates a proceeding frame (of
whatever type) from a following Data or Remote
Frame.
Summary of Contents for dsPIC30F6010
Page 12: ...dsPIC30F6010 DS70119B page 10 Advance Information 2004 Microchip Technology Inc NOTES...
Page 32: ...dsPIC30F6010 DS70119B page 30 Advance Information 2004 Microchip Technology Inc NOTES...
Page 38: ...dsPIC30F6010 DS70119B page 36 Advance Information 2004 Microchip Technology Inc NOTES...
Page 50: ...dsPIC30F6010 DS70119B page 48 Advance Information 2004 Microchip Technology Inc NOTES...
Page 68: ...dsPIC30F6010 DS70119B page 66 Advance Information 2004 Microchip Technology Inc NOTES...
Page 72: ...dsPIC30F6010 DS70119B page 70 Advance Information 2004 Microchip Technology Inc NOTES...
Page 76: ...dsPIC30F6010 DS70119B page 74 Advance Information 2004 Microchip Technology Inc NOTES...
Page 86: ...dsPIC30F6010 DS70119B page 84 Advance Information 2004 Microchip Technology Inc NOTES...
Page 108: ...dsPIC30F6010 DS70119B page 106 Advance Information 2004 Microchip Technology Inc NOTES...
Page 116: ...dsPIC30F6010 DS70119B page 114 Advance Information 2004 Microchip Technology Inc NOTES...
Page 128: ...dsPIC30F6010 DS70119B page 126 Advance Information 2004 Microchip Technology Inc NOTES...
Page 150: ...dsPIC30F6010 DS70119B page 148 Advance Information 2004 Microchip Technology Inc NOTES...
Page 164: ...dsPIC30F6010 DS70119B page 162 Advance Information 2004 Microchip Technology Inc NOTES...
Page 208: ...dsPIC30F6010 DS70119B page 206 Advance Information 2004 Microchip Technology Inc NOTES...
Page 220: ...dsPIC30F6010 DS70119B page 220 Advance Information 2004 Microchip Technology Inc NOTES...
Page 221: ...2004 Microchip Technology Inc Advance Information DS70119B page 221 dsPIC30F6010 NOTES...







































































