
















32
Service Manual
www.microphase.eu
Dc
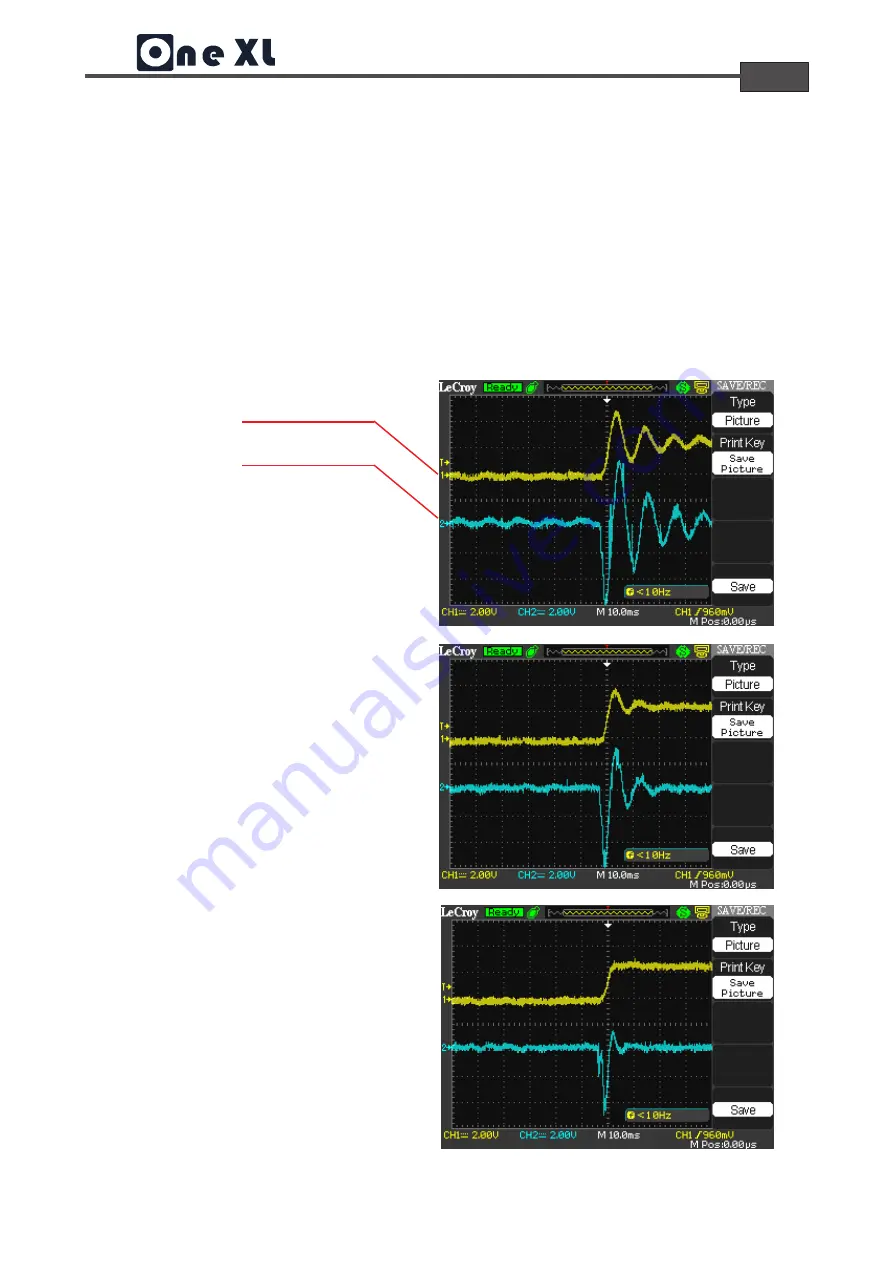
Behavior of the motor with both GAIN and
DERIVATIVES trimmer to a minimum of
function (trimmer totally rotated
counterclockwise CCW). The speed signal is
unstable, idem for the current signal of the
motor. See chart at right
Turning clockwise CW the trimmer GAIN (4 / 5
turns) the dynamic behavior improves, not to
exceed with this adjustement are otherwise the
motor will be vibrating. See chart at right
To further improve the behavior of the motor
and mechanics related to it and the over all
damping of the speed signal oscillation , act
trimmer DERIV. turning it clockwise CW (4 / 5
turns). See chart at right
Velocity of the motor
Current of the motor
NOTE: The dynamic calibrations are performed
using a reference speed (in + /-VEL) of about 1
or 2V. You can use the voltage output from the
CNC control, paying attention to rule out the
correction of space. Or use an external oscillator
or a small battery 1.5 V
4.7
Dynamic adjustement
The multi-turn GAIN and DERIV trimmer allow to dynamically tune of the motor and its mechanics
linked to it. These trimmers have full excursion from minimum to maximum, with 15 turns of rotation
of the same.
The charts shown the track 1 "yellow" is the speed signal available in the point TEST. Track 2 blue
highlights instead the current signal taken at terminal 1 (M1 signals connector pitch 3.81)
Signals are reported with a step voltage of the reference signal speed of about 2V.
These signals can be displayed by connecting the two probes of an oscilloscope at those points. The
zero signal 0S (zero probes) can be connected by a wire to pin 4 (M1 signals connector pitch 3.81)







































































