


















5
Service Manual
www.microphase.eu
Dc
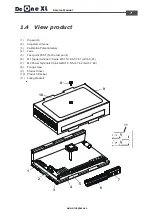
Description
Operation mode
General characteristic
Closing the velocity feedback loop to motor may be done in several different ways to accommodate
most applications. This types of velocity feedback are available with DC brush motors.
Velocity feedback
• DC motor with encoder
• DC motor with internal PWM (Armature)
• DC motor with tachogenerator
This is a drive capable to drive
DC brush
motors, up to 12Nm. It's a High Performance full four
quadrant drive servo amplifier. The mosfet output power stage is controlled by a 20 Khz PWM (Pulse
Width Modulation) signal that allows it to drive servo motors where high dynamic performance and
precise speed is required.
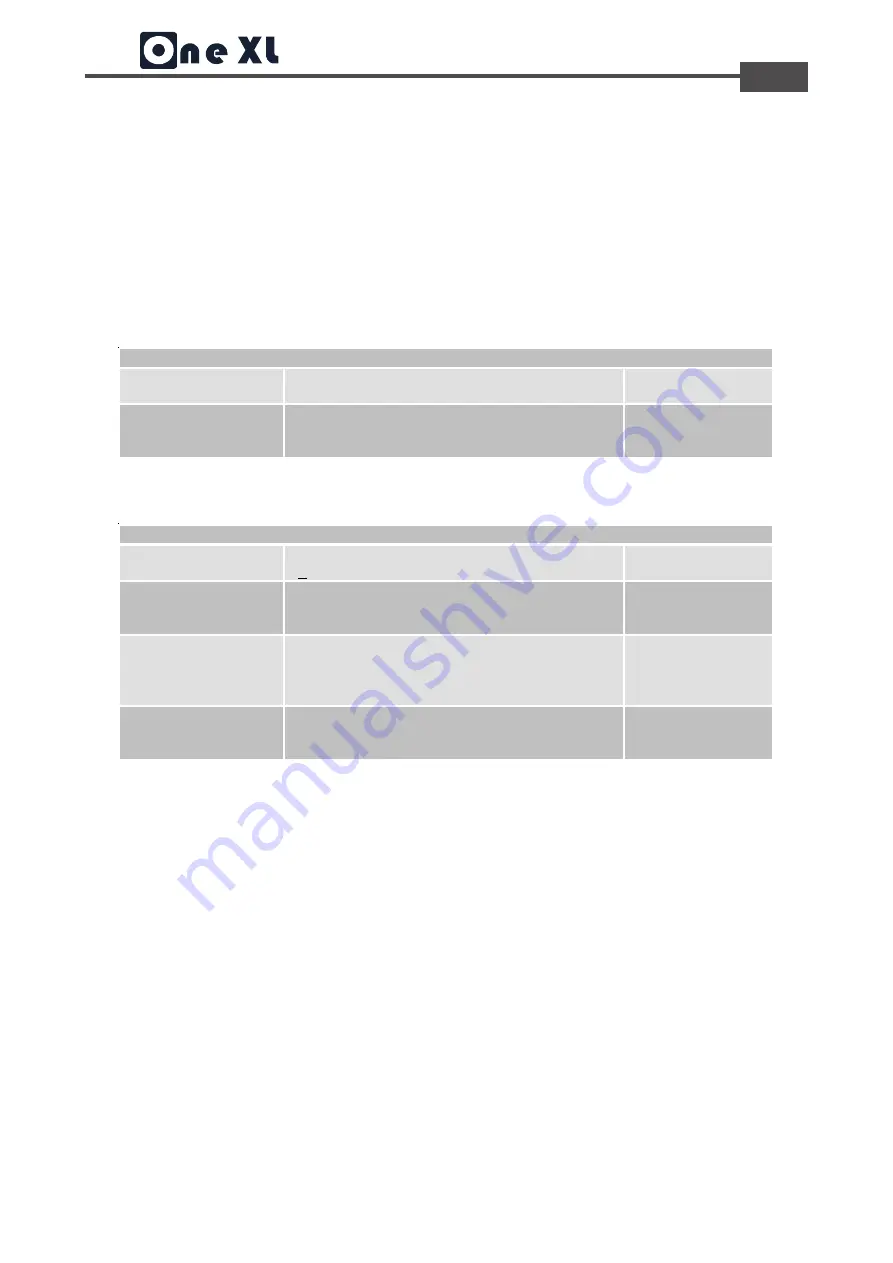
1.2
Operation mode and feedback
DESCRIPTION
SPEED CONTROL
INPUT
It is speed piloting using an analogue
reference (differential or common mode)
STANDARD
TORQUE CONTROL
INPUT
It is torque piloting using an analogue
reference. This function allows you to control
the current from the drive.
STANDARD
DESCRIPTION
START INPUT
Start input, enable the drive with range from
>9Vdc to +30Vdc (min/max)
STANDARD
FAULT OUTPUT
Fault drive, open collector output 50mA max.
(Normally closed, opens when in protection
mode)
STANDARD
2 ANALOG
OUTPUT
1 motor velocity monitor “TEST”, with range +/-
8 Vdc output
1 current monitor "CURR", with range +/-8 Vdc
output
STANDARD
LED INDICATOR
Four LEDs are located just in front of the
potentiometers and show the current state of
the drive
STANDARD







































































