





























35
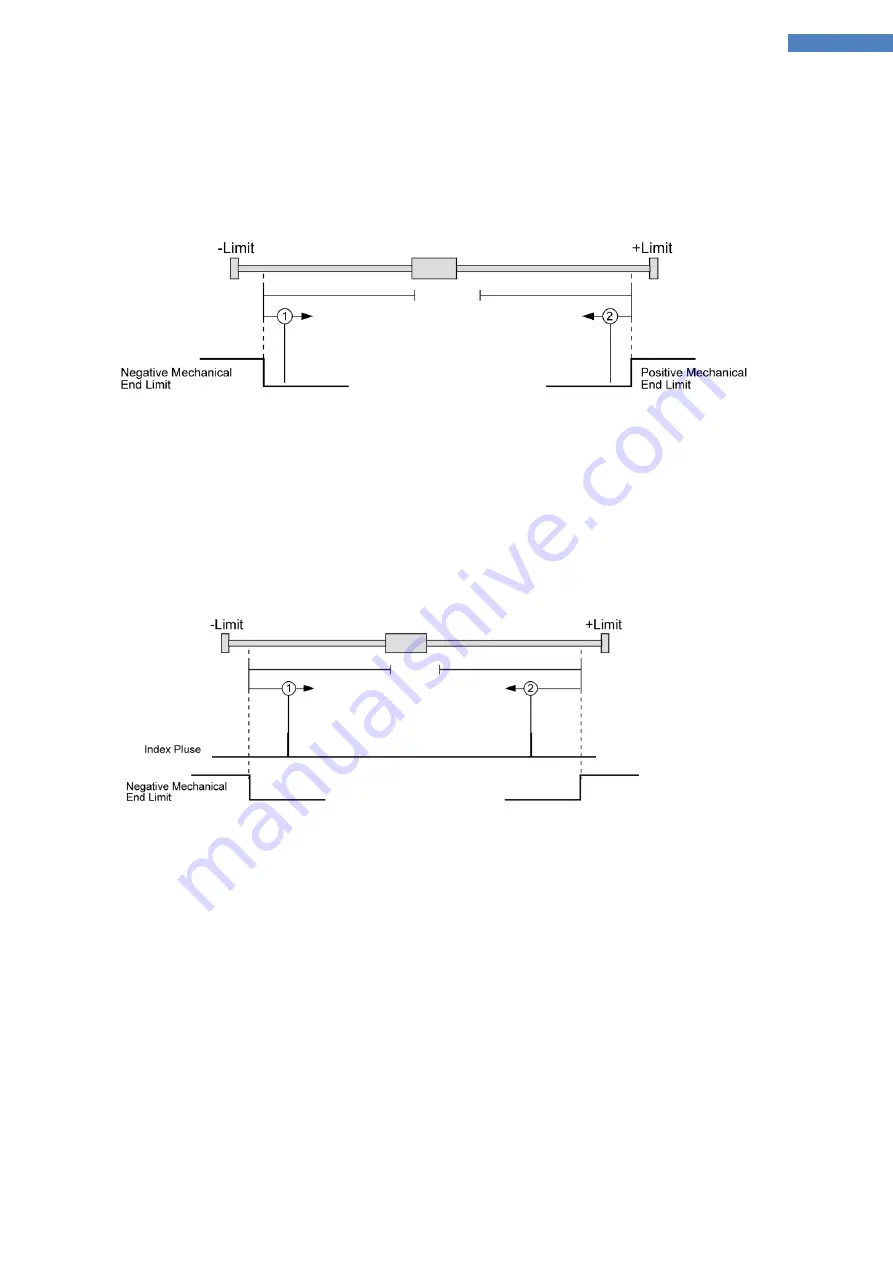
(7) Torque Origin
(
Org Method = 6
)
During the motion by ‘Org Speed’ value ,It will stop motion when detects the force as
much as ‘Org Torque Ratio’ by contacting with a particular object, and finish the origin
movement after moving a specified distance with opposite direction.
This method can be used in the system without origin sensor or limit sensor.
①
In case of Org Dir is 1 (CCW)
②
In case of Org Dir is 0 (CW)
(8) Z Torque Origin
(
Org Method = 7
)
‘During the motion by ‘Org Speed’ value , It will stop motion when detects a force as much
as ‘Org Torque Ratio’ by contacting with a particular object, And move to opposite
direction until detecting the Z phase.
This method can be used in system without origin sensor or limit sensor.
①
In case of Org Dir is 1 (CCW)
②
In case of Org Dir is 0 (CW)
*Caution : If the command resolution is different from the encoder resolution, problems
may occur when finding the index pulse.







































































