





























10. Safety system
MiR250 Shelf Carrier User Guide (en) 03/2021 - v.1.4 ©Copyright 2021: Mobile Industrial Robots A/S.
107
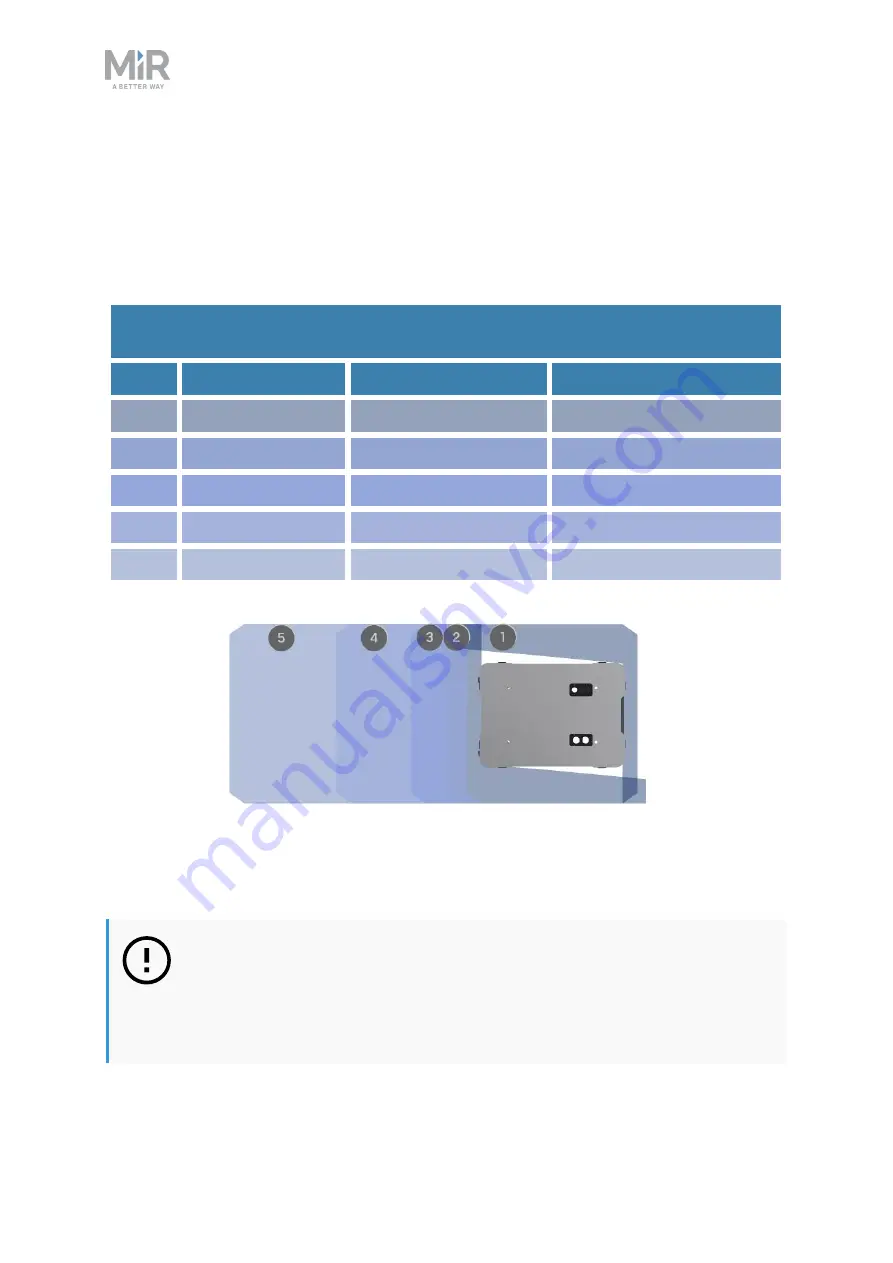
Field set when driving backward
The field set for driving backward is the same as the field set for driving forward. However,
the robot is limited to a top speed of 1.0 m/s when driving backward and therefore only has
five fields. The colors and cases in
correspond to the field set shown in
.
Case
Speed
Protective field range
Comments
1
0.0 to -0.10 m/s
0-80 mm
When pivoting
2
-0.10 to -0.30 m/s
0-180 mm
3
-0.30 to -0.50 m/s
0-360 mm
4
-0.50 to -0.90 m/s
0-780 mm
5
-0.90 to -1.00 m/s
0-1350 mm
Backward at max. speed
Table 10.2.
Ranges of the robot's Protective fields within its backward speed interval cases
Figure 10.6. The illustration shows the field set contours when driving backward. The range of the active field
changes with the robot's speed. The illustration also shows how the front scanner reduces its Protective field to
a minimum when the robot moves backward.
NOTICE
Scanners measure distances to diffuse reflections, which means that a
tolerance is added to the Protective field sets to secure a safe detection of
persons crossing the Protective field sets. The tolerance distance is 65 mm.







































































