





























11. Commissioning
MiR250 Shelf Carrier User Guide (en) 03/2021 - v.1.4 ©Copyright 2021: Mobile Industrial Robots A/S.
125
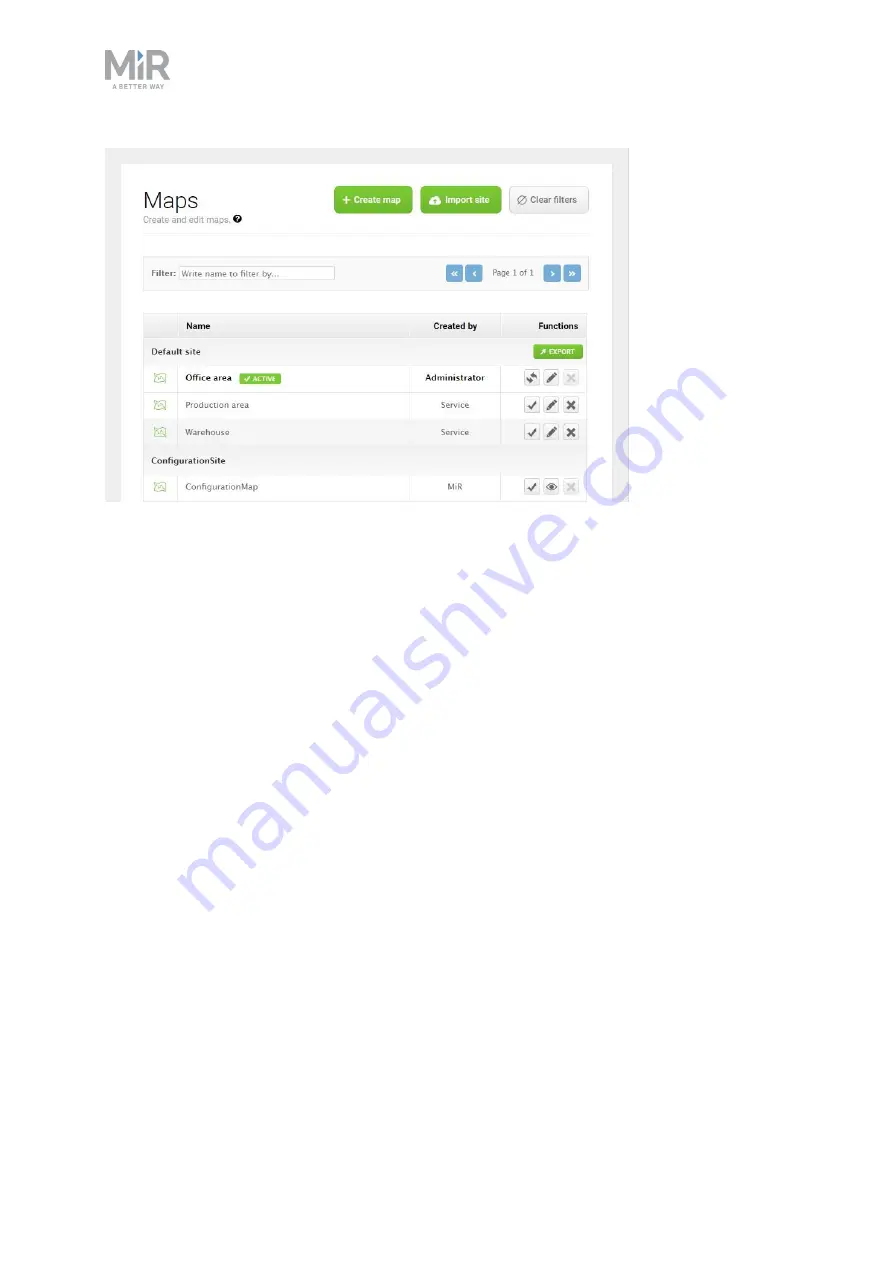
Figure 11.4. The
Default site
has three maps within it for the areas in the site:
Office area
,
Production area
,
and
Warehouse
.
A site contains one or more maps that often connect to each other. The number of maps you
need in a site depends on the work environment of the robot:
•
If the operating area is very large, you may need to split the area into smaller maps.
•
You can tell that a map is too large if the robot takes a long time to plan its routes or
often reports CPU errors.
•
In general, we recommend that maps should not exceed an area of 300 x 300 meters.
•
You can connect smaller maps using map transitions—see
MiR Robot Reference Guide
,
or ask your distributor for the guide
How to set up transitions between maps
.
•
If the robot must operate on different floors connected with ramps or elevators, you must
have a map for each floor.
•
If you are using an elevator, ask your distributor for the guide
How to set up elevators
in MiR Fleet
.
•
If you are using ramps, connect the maps using transitions—see
MiR Robot Reference
Guide
, or ask your distributor for the guide
How to set up transitions between maps
.







































































