





























11. Commissioning
MiR250 Shelf Carrier User Guide (en) 03/2021 - v.1.4 ©Copyright 2021: Mobile Industrial Robots A/S.
143
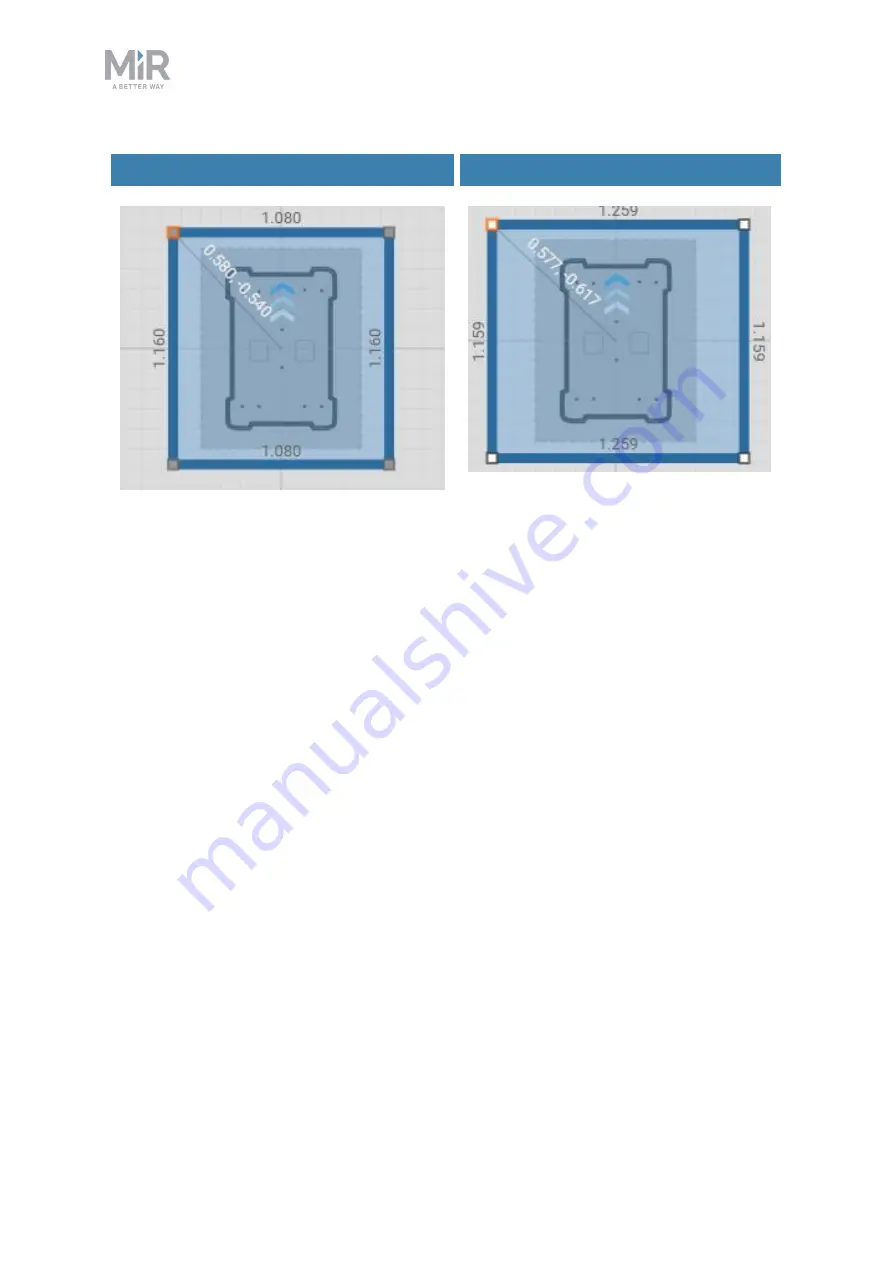
Default footprint
Larger footprint
Figure 11.18. Examples of the default robot footprint and an extended footprint. The values displayed along
each line is the length of the edge in meters.
The number of footprints you need to define depends on:
•
If there are low hanging fixtures that the robot can pass under only when it is not carrying
certain loads or top modules, you must define new footprints for the various heights that
the robot and its load can have to ensure that they don't collide with the low hanging
fixtures.
•
The top modules you use with your robot.
•
If a robot's top module exceeds the width or length of the robot, you must define a new
footprint for that top module.
•
If a top module has moving parts that can extend over the edges of the robot's
footprint while the robot is moving, you must define a footprint that includes the
moving parts when they are at their most extended positions.
•
The loads the robot transports.
•
For each load the robot transports that exceeds the length or width of the robot, you
must define a footprint for that load.
•
If you prefer to only have one footprint for the robot when it is carrying oversized
loads, create a footprint that is suitable for the load that has the largest footprint.







































































