





























11. Commissioning
MiR250 Shelf Carrier User Guide (en) 03/2021 - v.1.4 ©Copyright 2021: Mobile Industrial Robots A/S.
159
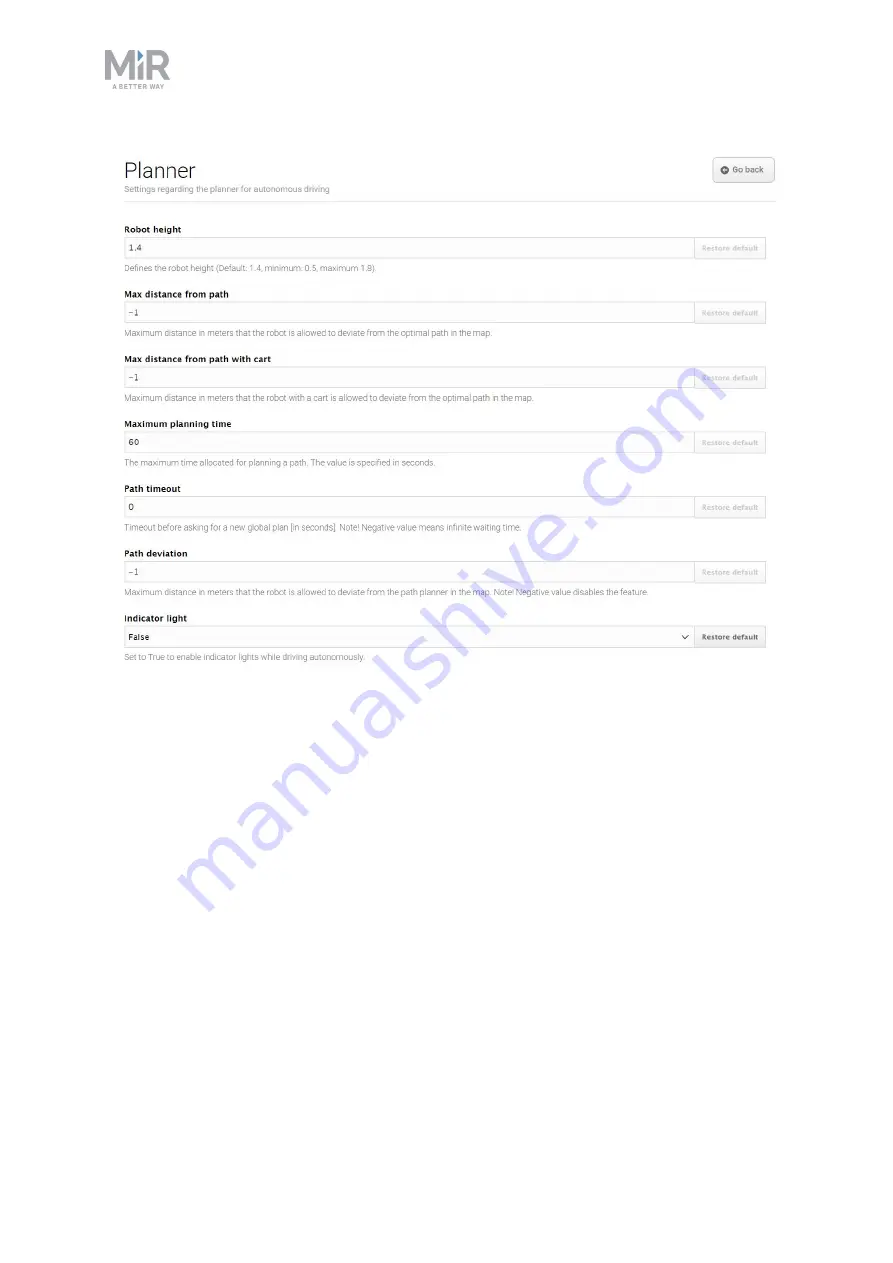
Figure 11.27. You set basic parameters for driving the robot in the Planner section.
Robot height
defines the height of the robot including top modules. Use this setting if your
robot operates permanently with a top module that makes the combined robot application
higher than the robot itself. This prevents the robot from colliding with obstacles from
above.
Max distance from path
defines the maximum allowed distance in meters that the
generated global path is allowed to deviate from the most direct path on the map. By
default, this parameter is disabled, meaning the robot will always make a global path and
follow it to the goal position no matter how far the path is. If you want to avoid the robot
traveling paths of a specific length and report an error instead, enter the maximum length
that the global path may exceed the most direct path.







































































