12. Usage
MiR250 Shelf Carrier User Guide (en) 03/2021 - v.1.4 ©Copyright 2021: Mobile Industrial Robots A/S.
172
6.
Select
OK
to create the marker. The marker is now visible on the map.
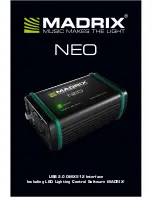
You can make the robot dock to the marker by selecting it on the map and selecting
Go to
.
The marker can also be used in missions.
12.2 Creating positions
The following steps describe how to create a position on a map. In this example, we are
creating a Robot position .
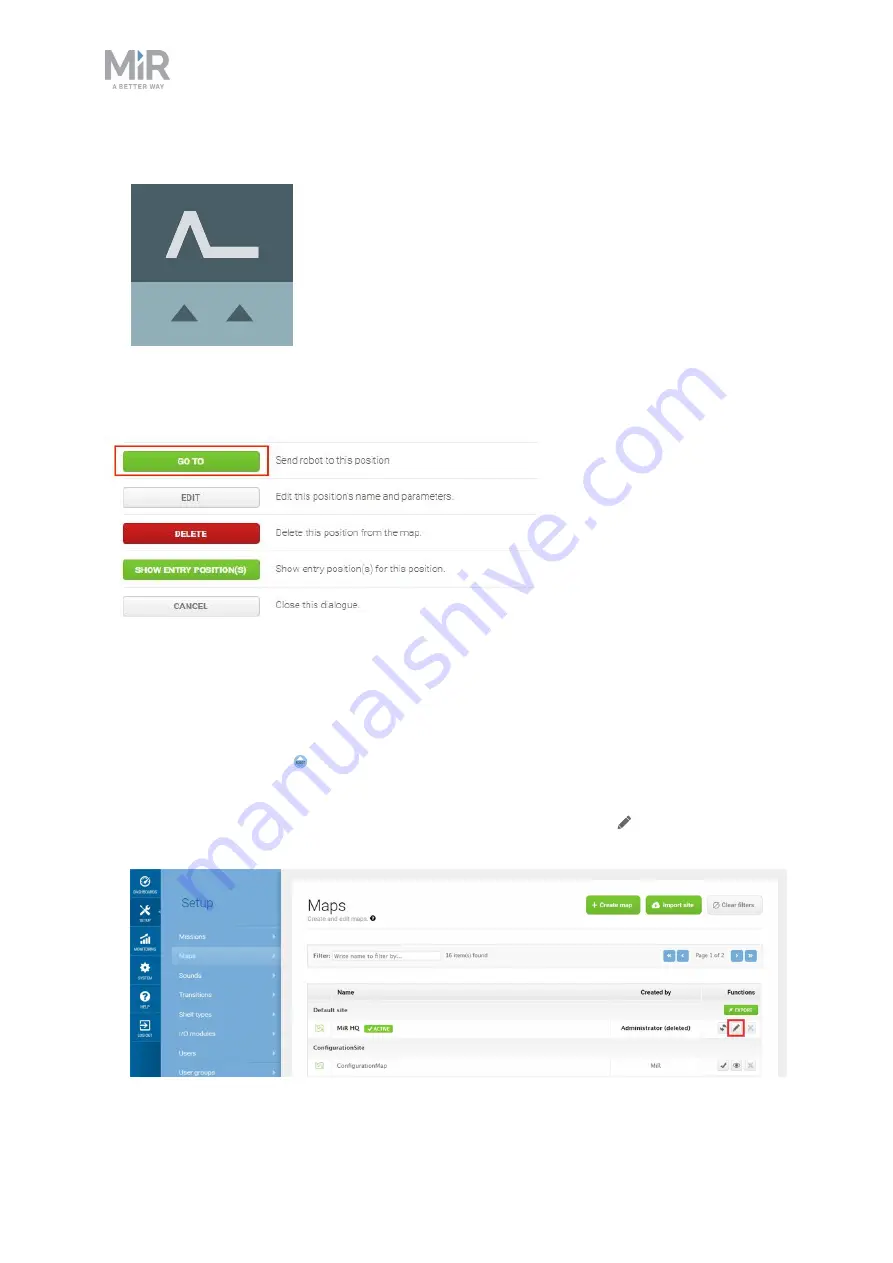
1.
In the robot interface, enter the map editor of the map where you want to create a
position. This is done by going to
Setup > Maps
and selecting
Edit
next to the map you
would like to work on.