





























12. Usage
MiR250 Shelf Carrier User Guide (en) 03/2021 - v.1.4 ©Copyright 2021: Mobile Industrial Robots A/S.
195
7.
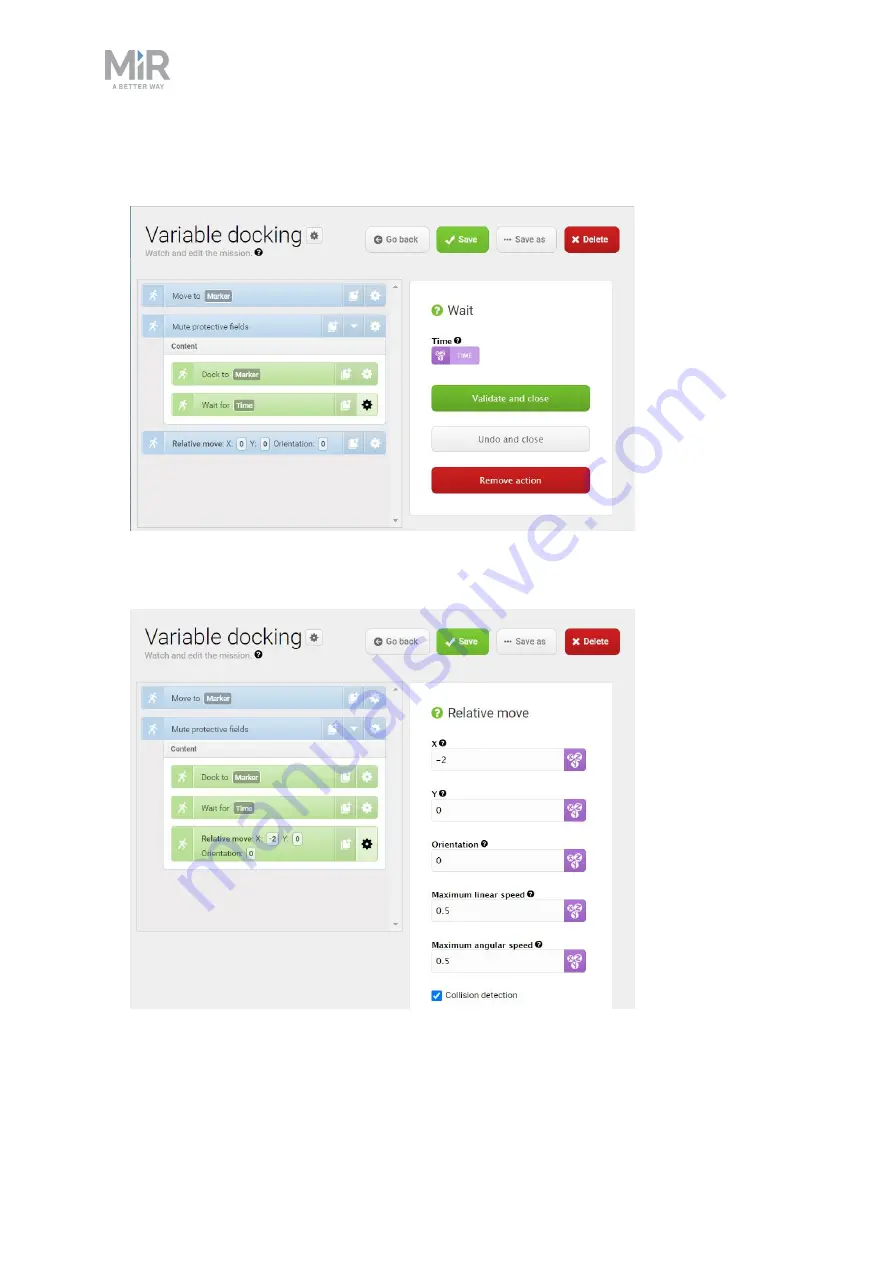
Drag the Wait action into the Mute protective fields action, and under
Time
, create
another variable titled
Time
.
8.
Drag the Relative move action into the Mute protective fields action, and under
X
, enter
-2
. This will make the robot move two meters back to undock from the marker.







































































