





























12. Usage
MiR250 Shelf Carrier User Guide (en) 03/2021 - v.1.4 ©Copyright 2021: Mobile Industrial Robots A/S.
206
4.
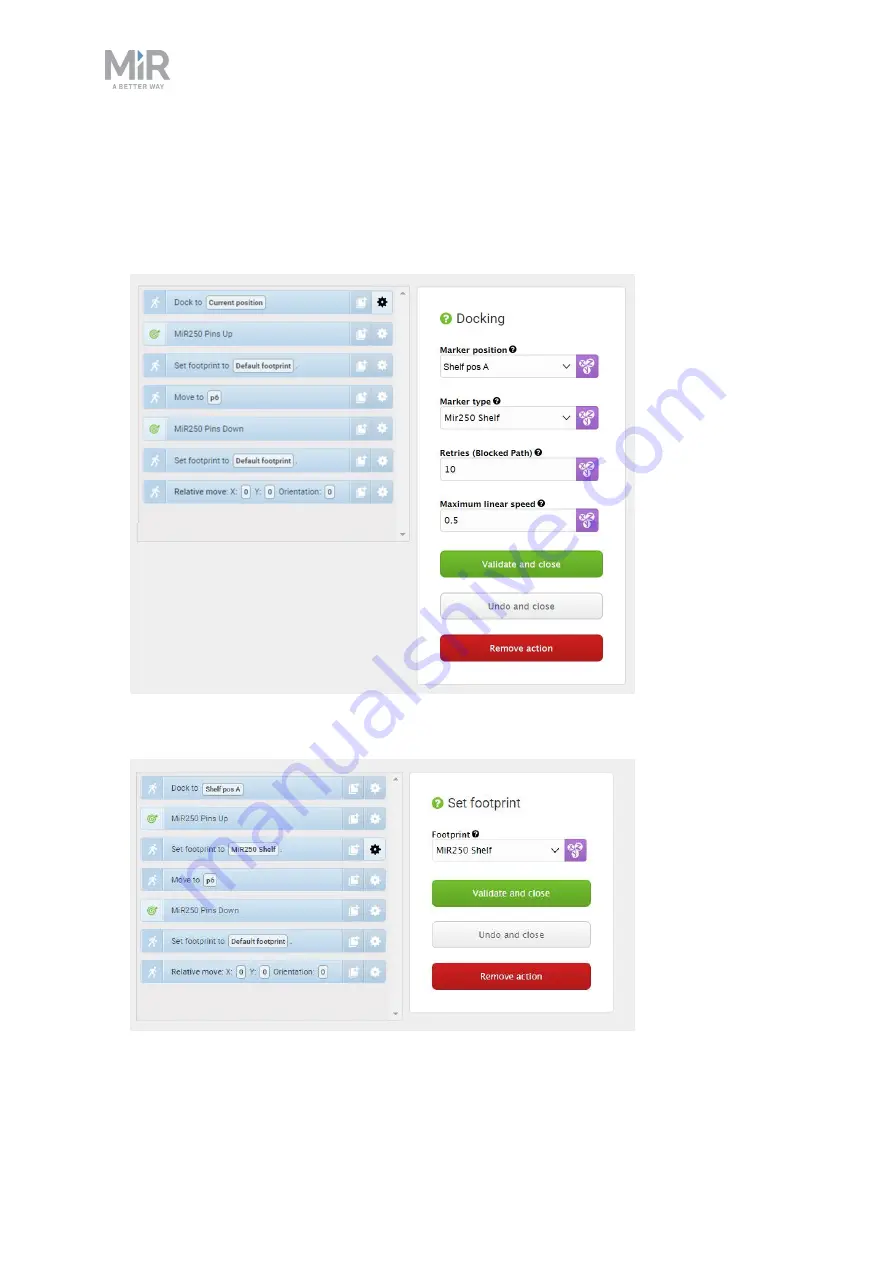
For the
Docking
action, set the parameters as follows:
•
Position
: Select
Shelf pos A
.
•
Marker type
: Select
MiR250 Shelf
.
•
Retries
and
Maximum linear speed
: Leave these at the default value.
5.
For the Set footprint action, select the
MiR250 Shelf
.







































































