





























12. Usage
MiR250 Shelf Carrier User Guide (en) 03/2021 - v.1.4 ©Copyright 2021: Mobile Industrial Robots A/S.
210
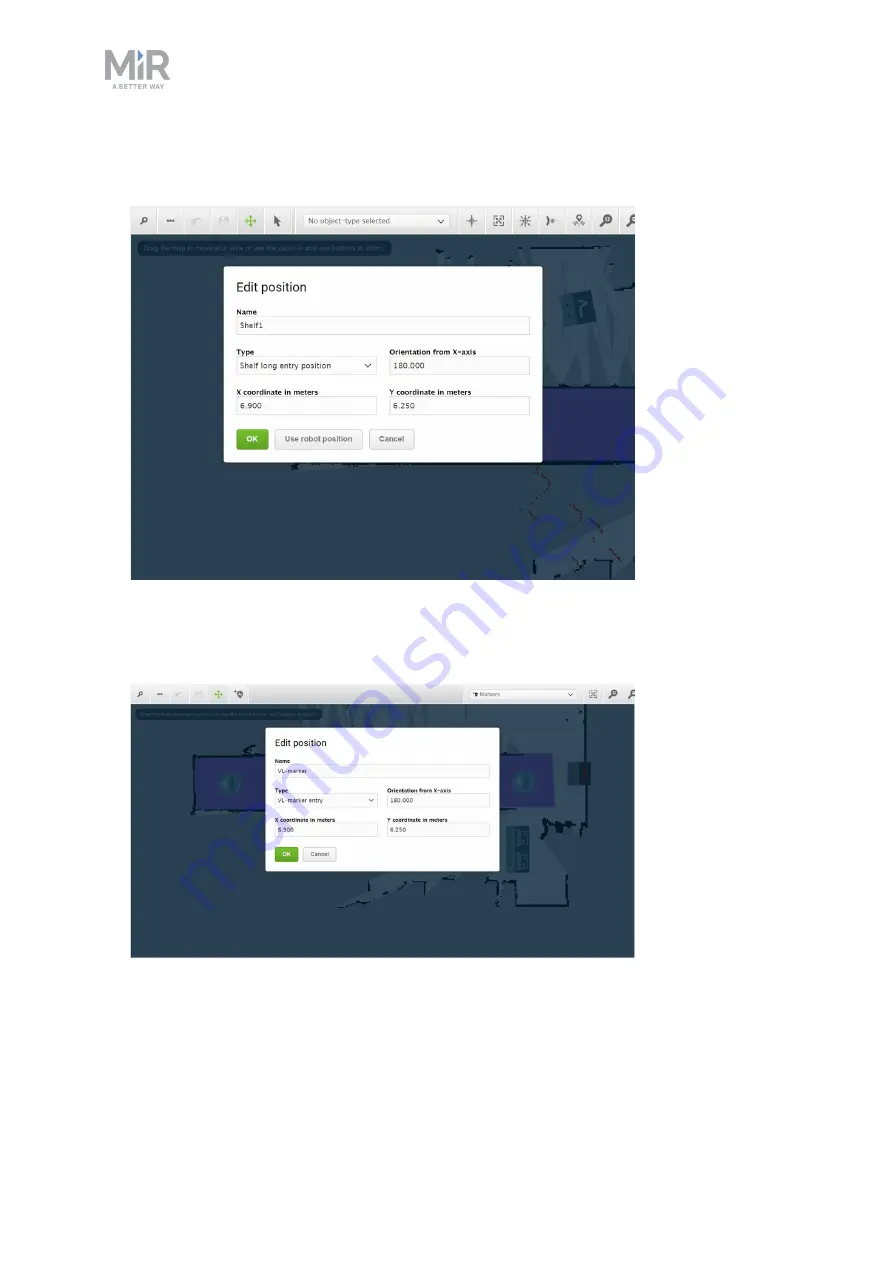
4.
Select
Edit
if you want to adjust the entry position. Note the X and Y coordinates of the
entry position.
5.
Select the VL-marker on the map. Then select
Show entry position
.
6.
Select the VL-marker's entry position, and insert the same X and Y coordinates of the
shelf position's entry position.
7.
Repeat the previous steps with all other markers where you want the robot to place
shelves accurately.







































































