





























9. Navigation and control system
MiR250 Shelf Carrier User Guide (en) 03/2021 - v.1.4 ©Copyright 2021: Mobile Industrial Robots A/S.
96
•
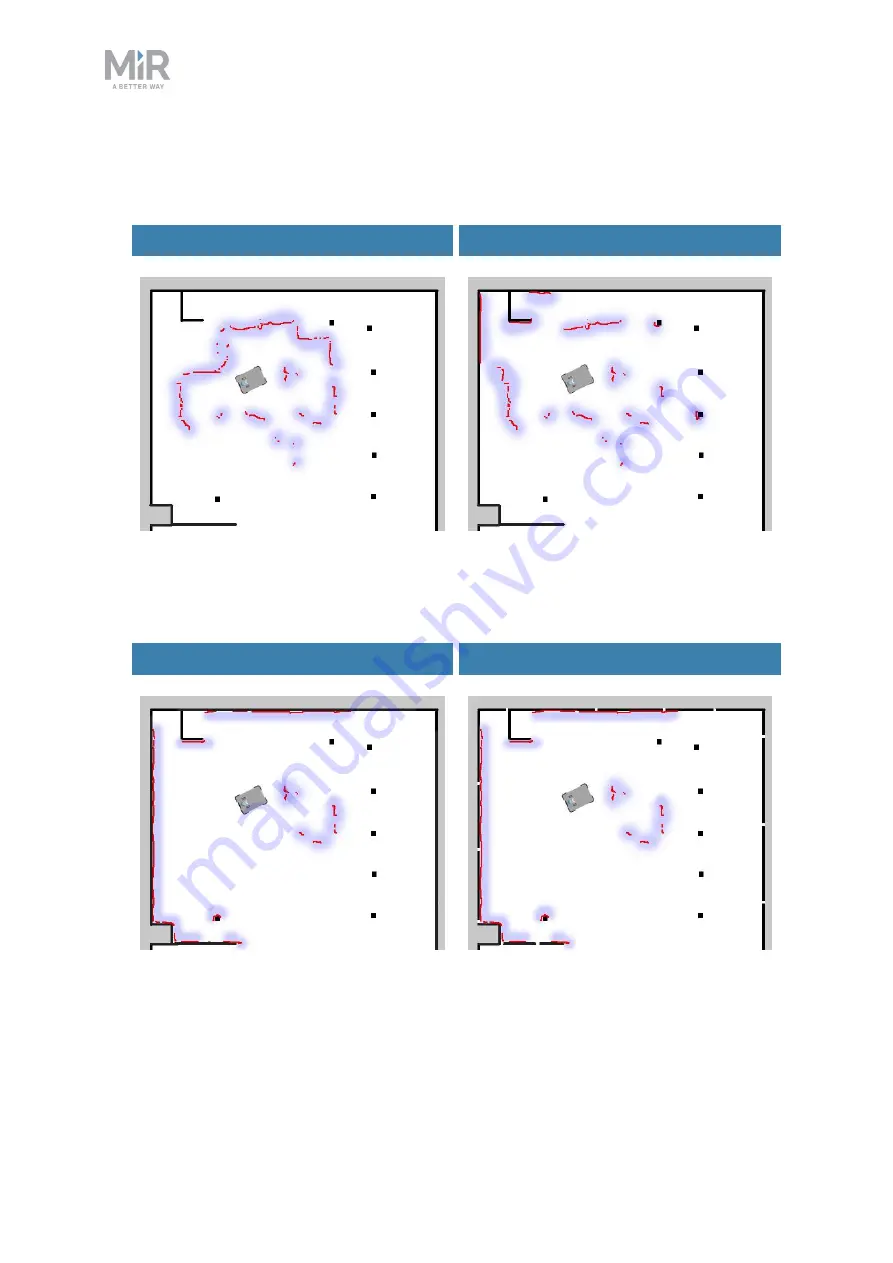
The robot must be able to detect the static landmarks that are marked on the map to be
able to approximate its current position. Make sure there are not too many dynamic
obstacles around the robot so that it cannot detect any static landmarks.
Cannot detect any static landmarks
Can detect enough static landmarks
•
To improve the robot's localization, it can often help to divide long continuous walls on
the map. Even if the walls are connected in the actual work environment, it can help the
localization process if the walls on the map are divided into smaller sections.
Undivided walls
Divided walls







































































