





























10. Safety system
MiR250 Shelf Carrier User Guide (en) 03/2021 - v.1.4 ©Copyright 2021: Mobile Industrial Robots A/S.
110
10.6 MiR Shelf Carrier 250 safety functions
When MiR Shelf Carrier 250 is mounted to MiR250, the electrical top interfaces are no
longer accessible.
The interfaces are used to communicate the position of the carrier pins and the state of the
safety contactors in MiR Shelf Carrier 250. This information is used for integrated safety
functions that are specific to MiR Shelf Carrier 250.
Shelf specific Protective field sets
When the safety PLC registers that the carrier pins are raised, it is assumed that the robot is
carrying a shelf. When the robot is carrying a shelf, its Protective field sets are reduced due
to the legs of the shelf creating blind spots. To accommodate this, the robot can drive with a
maximum speed of 1.2 m/s while carrying a shelf, and the Protective field sets are changed
automatically to a set that is specifically used when the robot carries shelves. These
Protective field sets have the following changes compared to the sets used when the robot
drives without a shelf:
•
They include blind spots in the positions where legs of the shelf block the safety laser
scanners.
•
They have a longer forward range—see
.
•
The fields are increased to 310 mm to the sides.
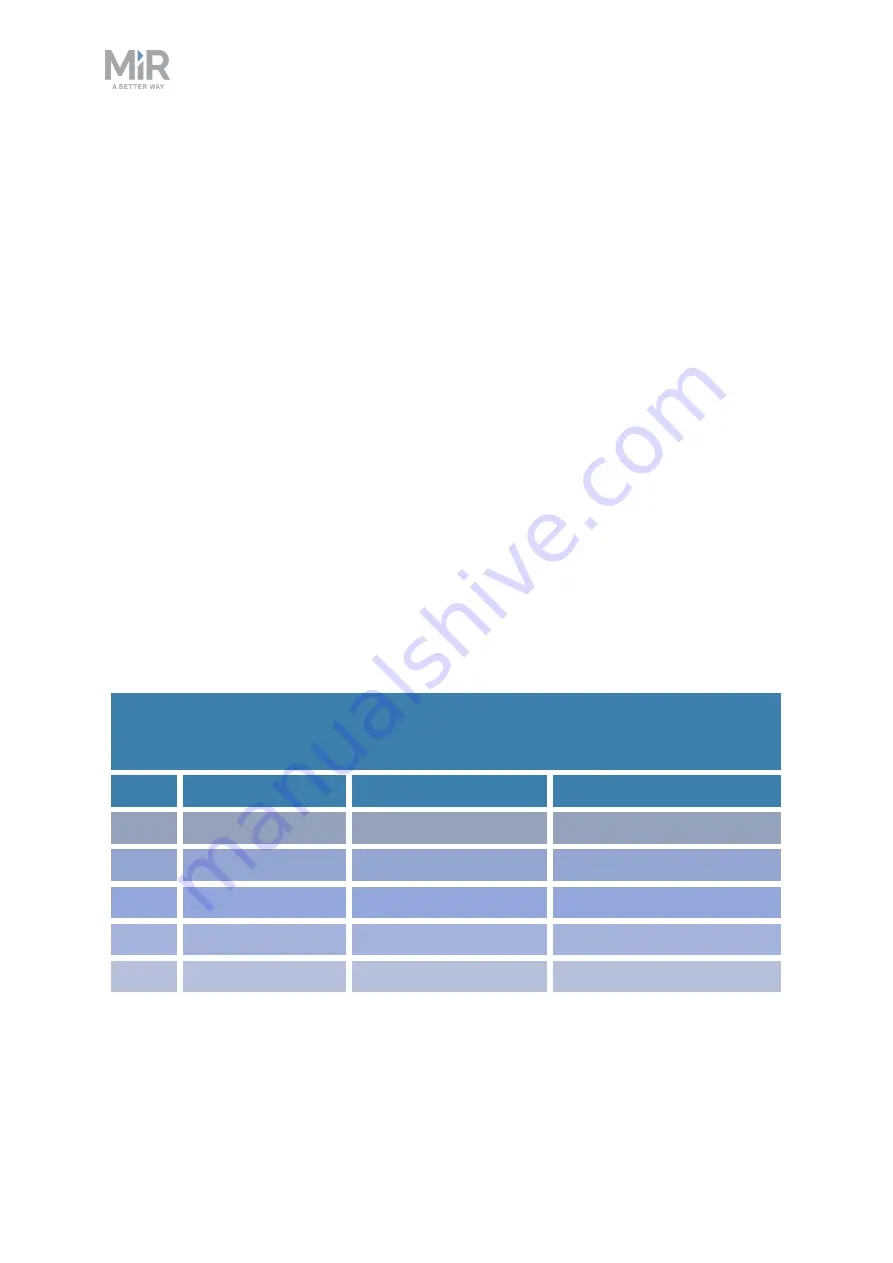
Case
Speed
Protective field range
Comments
1
0.0 to 0.10 m/s
80 mm
When pivoting
2
0.10 to 0.30 m/s
180 mm
3
0.30 to 0.50 m/s
420 mm
4
0.50 to 0.90 m/s
830 mm
5
0.90 to 1.20 m/s
1500 mm
Forward at max. speed
Table 10.4.
Range of Protective fields while the robot is carrying a shelf within its speed interval
cases







































































