11. Commissioning
MiR250 Shelf Carrier User Guide (en) 03/2021 - v.1.4 ©Copyright 2021: Mobile Industrial Robots A/S.
123
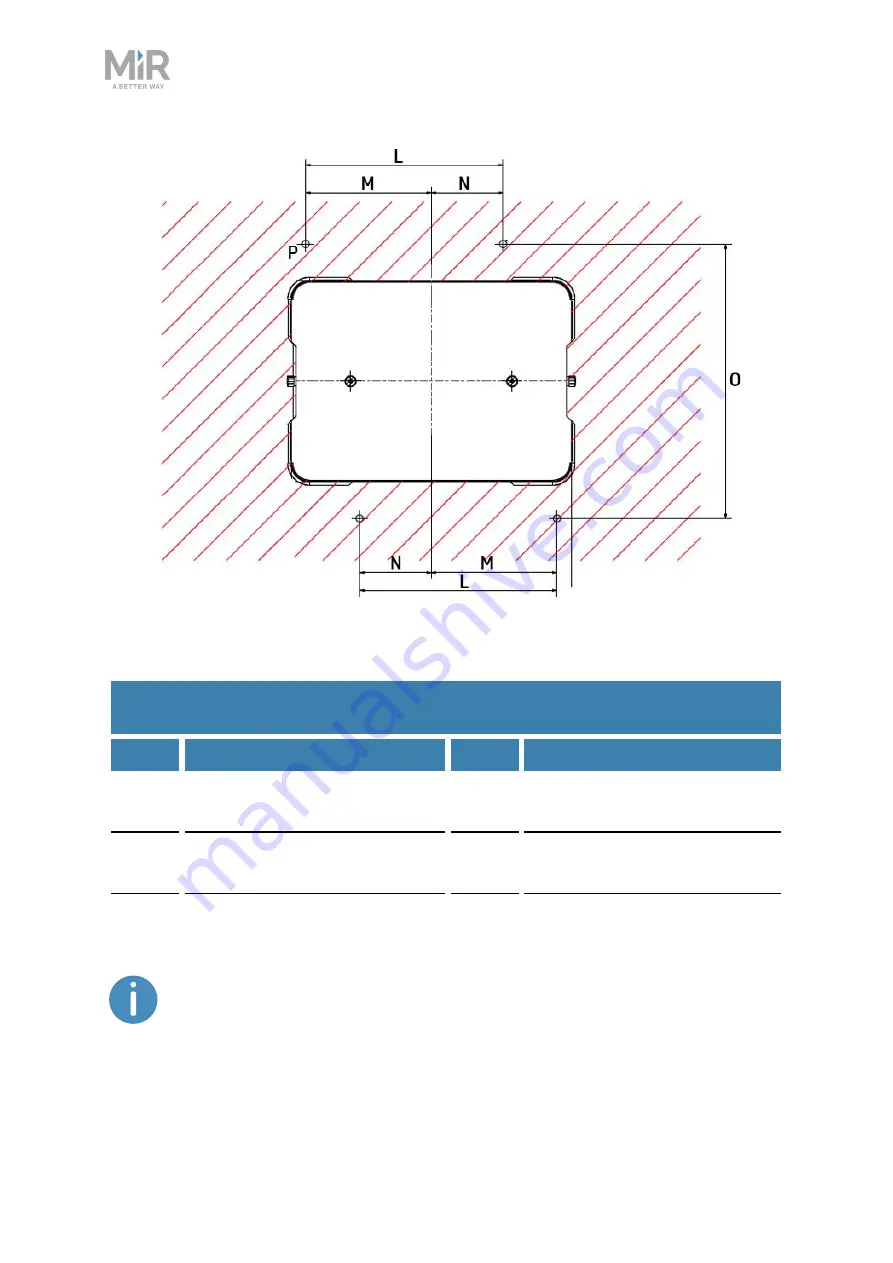
Figure 11.2. Top view of the robot. The red hatched area marks the scanner zone. Only the four legs indicated
with circles can be placed in the zone at the defined positions.
Pos.
Description
Pos.
Description
L
Distance between legs on side:
550 mm
M
Displacement from robot's
center: 350 mm
N
Displacement from robot's
center: 200 mm
O
Distance between legs on
opposite sides: 765 mm
P
Leg diameter: 20 mm (+1/-0)
Table 11.2.
Dimensions for shelf leg positions
To enable the robot to dock to a shelf, you must define a marker type for the
shelf in the robot interface—see