





























5. Commissioning
MiR500 User guide (en) 09/2019 - v.1.3 ©Copyright 2018-2020: Mobile Industrial Robots A/S.
84
1.
In the robot interface, enter the map editor of the map where you want to create a
marker. This is done by navigating to
Setup > Maps
and selecting
Edit
next to the map
you would like to work on.
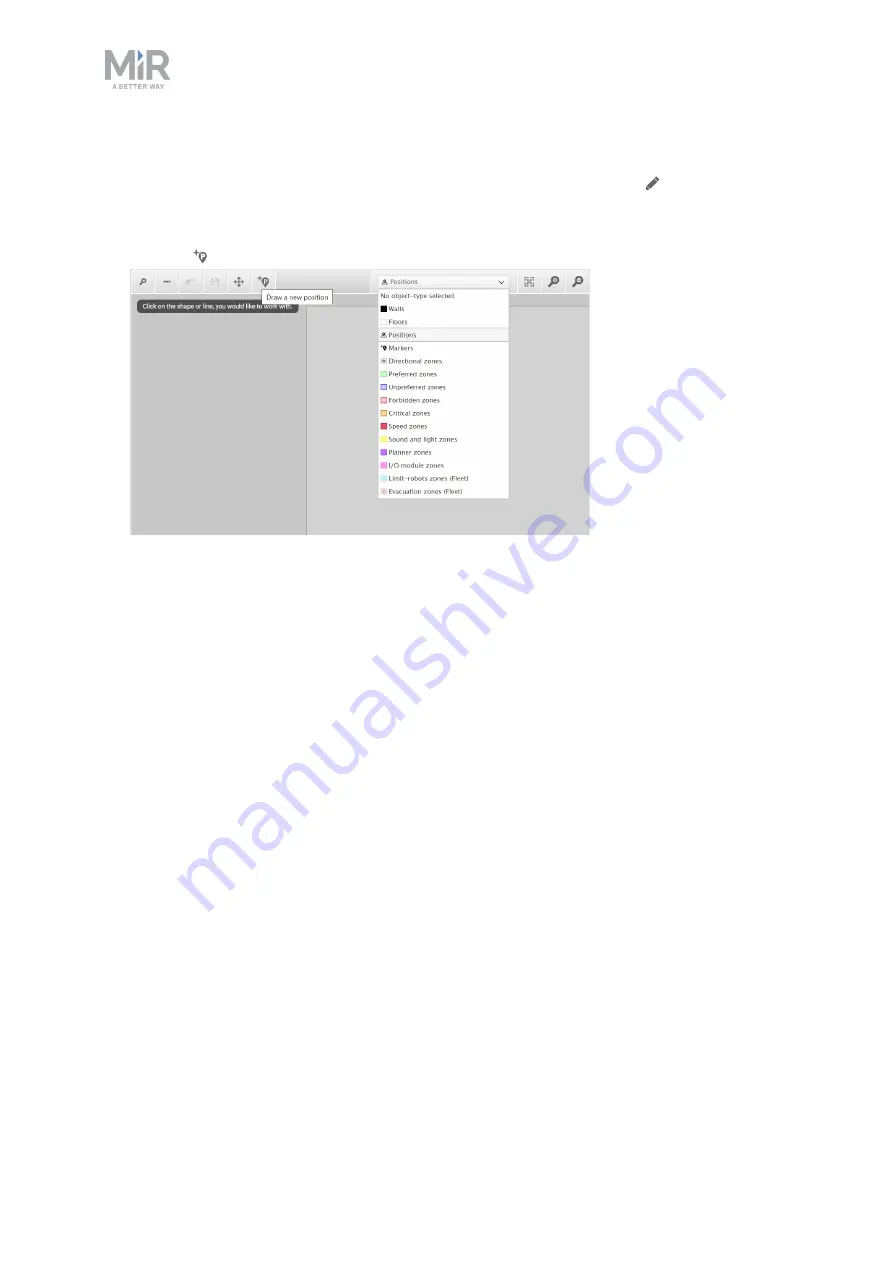
2.
In the Object-type drop-down menu, select
Positions
, and then select
Draw a new
position
.
3.
Click on the map where you want the position to be and choose in which direction you
want it to face.







































































