








MiR Intel Top camera –Technical documentation
Copyright Mobile Industrial Robots 2016
Page
7
of
9
3.4
Setting up top camera in ROS parameters
Follow these steps to set up the top camera software.
Ste
p
Instruction
Illustration
1
Log in as
administrative
user.
2
Go to
Service
Configuration
System
settings
ROS
parameters
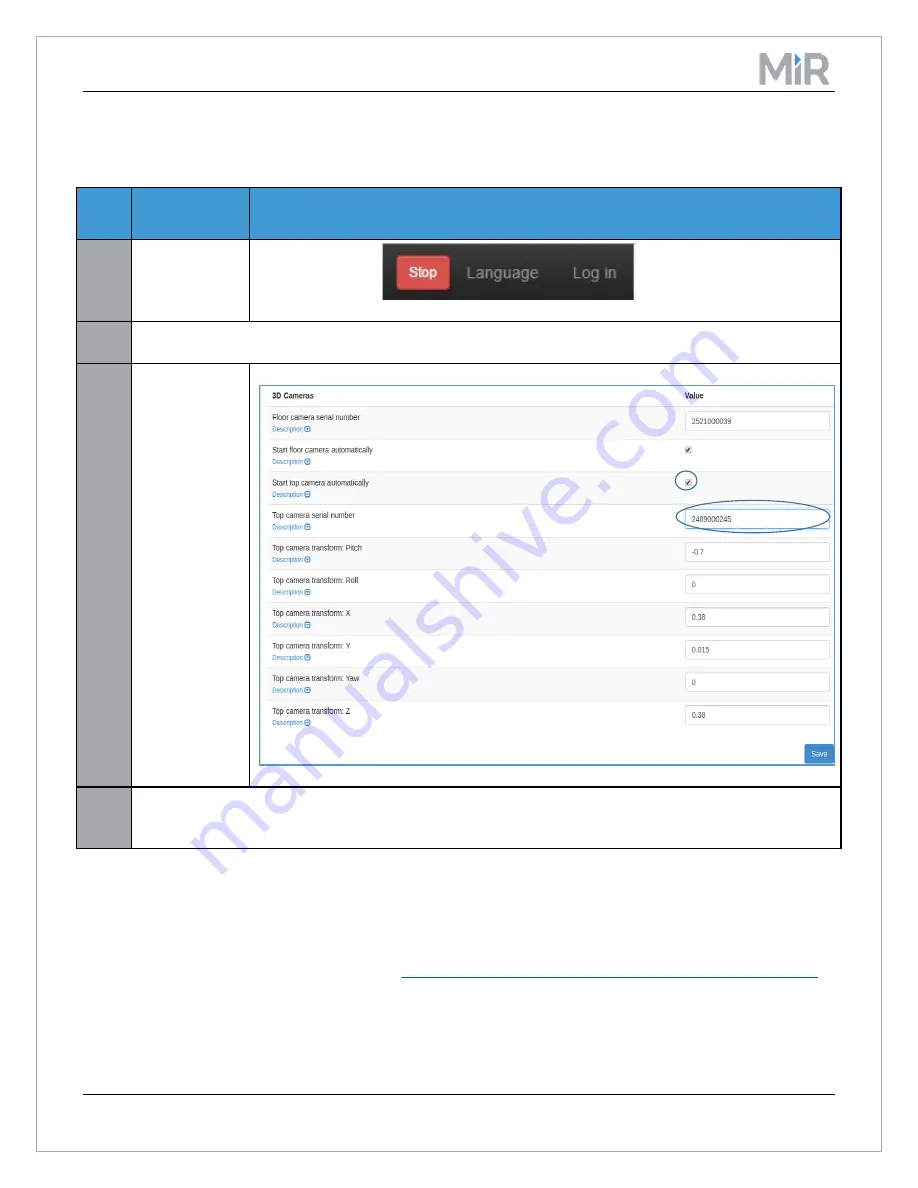
3
Find
3D
Cameras
under the ROS
parameters.
•
Tick off
Start top
camera
automatical
ly
•
Enter the
serial no. as
written on
the camera
bracket.
•
Click
Save
.
4
Restart the MiR100 by turning the power switch to OFF. Wait until the light of the MiR100 is off. Turn
the power switch ON.
The MiR100 is now ready to operate with the top camera.
Note!
The preset top camera parameters are valid when the camera is positioned directly on the top panel of
the MiR100 as shown in this document. If the camera is mounted in a different position or on an external top
module, the parameters must be adjusted accordingly.
For assistance, contact MiR Customer support,
https://mirrobot.atlassian.net/servicedesk/customer/portal/1







































































