




























α
2 Simple Application Controllers
Function Blocks 6
6 - 56
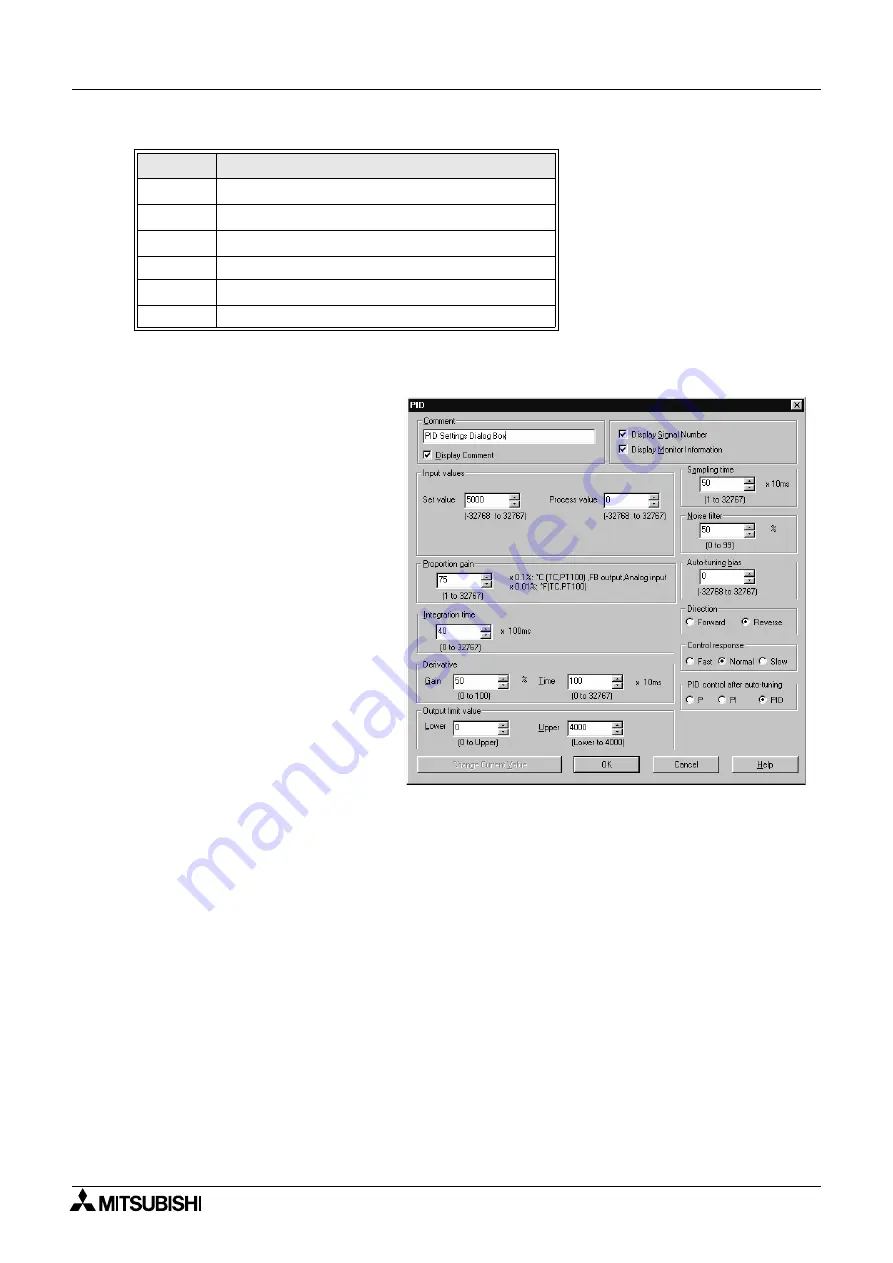
6.22.2 Setting the Input Values, SV and PV
Set Value, SV.
SV is the target
value for the system parameter
under PID control. The SV pin on
the Function Block accepts a
constant, a value from an analog/
tem p e ra t u re in p u t o r a wor d
output from another Function
B l o c k . T h i s v a l u e c a n b e
changed during PID operation. A
change during Auto-tuning has
no effect.
Process Value, PV.
The PV is
the current measured value of
the system parameter under PID
control. The PID Function Block
output drives the PV toward the
SV when PID control is operating
correctly. The PV field should
contain the appropriate signal
f r o m t h e s y s t e m u n d e r P I D
control.
6.22.3 Setting the Function Block Parameters
Proportional Gain, K
P
.
K
P
scales the magnitude of the MV. If only proportional control (P-
control without I- or D-control) is used, the Manipulated Value is purely dependent on the
change in deflection. (Deflection is the difference between the current state and the desired
state, also known as error value.) If PI- or PID-control is used, then the MV will depend on
other factors as well as deflection. The change in deflection between two adjacent sample
points is essentially a measure of how fast the Process Value is moving toward the SV. It is not
simply the difference between the current state, PV
nf
and the desired state, SV
nf
. The K
P
parameter can be set manually or automatically with the Auto-tuning function. The default
value for K
P
is 75 with a possible setting range of 1 to 32767. The units of K
P
depend on the
type of word data that is used. See the table below for the units. A small K
P
causes the PV to
rise slowly, to stablize slowly and to overshoot less. See section 6.22.5 for more information on
the formulas used for determining the system parameters during Auto-tuning.
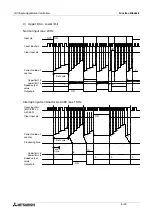
T
I
Integration Time
T
S
Sample Time
∆
MV
n
Change in Manipulated Value for the current sample
α
Proportional gain coefficient (See Control Response)
α
f
Input value filter coefficient
β
Integration time coefficient (See Control Response)
Table 6.26: List of Additional Variables used in the PID equations
Variable
Description







































































