





























α
2 Simple Application Controllers
Function Blocks 6
6 - 57
Note:
Other PID systems may calculate proportional control based on the magnitude of the current
deflection only.
Table 6.27: Units for K
P
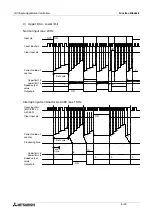
Figure 6.22a. Characteristic response for different K
P
parameters
Integration Time, T
I
.
A common problem with P-control is that it tends to stabilize the PV at a
value not equal to the SV (this is called an offset error). With PI-control, a temporal integration
factor is added to deal with this problem. The idea behind PI-control is to ramp up the effect of
P-control, if an offset error persists over time. The T
I
parameter can be set manually or
automatically with the Auto-tuning function. The default value for T
I
is 40 (4 seconds) but can
be set to any value within the range of 1 to 32767 (in 100ms units). When a small value for T
I
is
set, the PV will reach the SV within a relatively short amount of time with greater searching
(e.g. more overshoot and more undershoot) for the SV.
Note:
Setting zero for this variable disables the integration effect.
Figure 6.22b. Characteristic response for different T
I
parameters
Units
Type of Word data
Default Value
Range
0.1%
· Analog input
· Function Block word output
· Temperature input using the
Celsius scale.
7.5%
0.1% to 3276.7%
0.01%
· Temperature input using the
Fahrenheit scale
0.75%
0.01% to 327.67%
Time
Set value (SV)
Process value (PV)
offset error
K
P3
> K
P2
> K
P1
(Proportional gain)
K
P3
K
P2
K
P1
PV
Time
Set value
(SV)
Process value in P-action
T
I3
0 < T
I3
< T
I2
< T
I1
Process value in PI action
T
I2
T
I1
PV






































































