




























α
2 Simple Application Controllers
Function Blocks 6
6 - 59
Control Response.
When changes in the SV are necessary, the user can select whether the
changes from the initial SV to the final SV should be immediate or gradual. There are three
options for speed at which SV changes: slow, normal and fast. With immediate, or fast,
response, the controller tends to overshoot its target. With Normal Response there is less
overshoot. And, finally, with Slow Response, there should be no overshoot at all.
Table 6.28: Coefficient Values for Different Response Times
Note:
In certain systems, changing this parameter will have no effect on the response behavior of the
controller.
PID Control after Auto-tuning. P, PI, PID.
The controller can be setup to run in one of three
modes: P-control, PI-control or PID-control. The desired control type will only become effective
after auto-tuning has completed. The choice of control type should be made depending on the
application. For example, if P-control is a sufficient control method for the application, then the
more resource-intensive I- and D-control can be switched off to shorten the scan time.
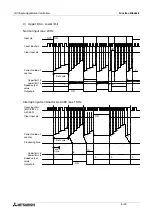
Changing the MV Current Value.
This function is only available in the VLS Programming
Language. Click “Change Current Value” to force the MV to another value. This function is
useful when manually fine tuning the PID parameters.
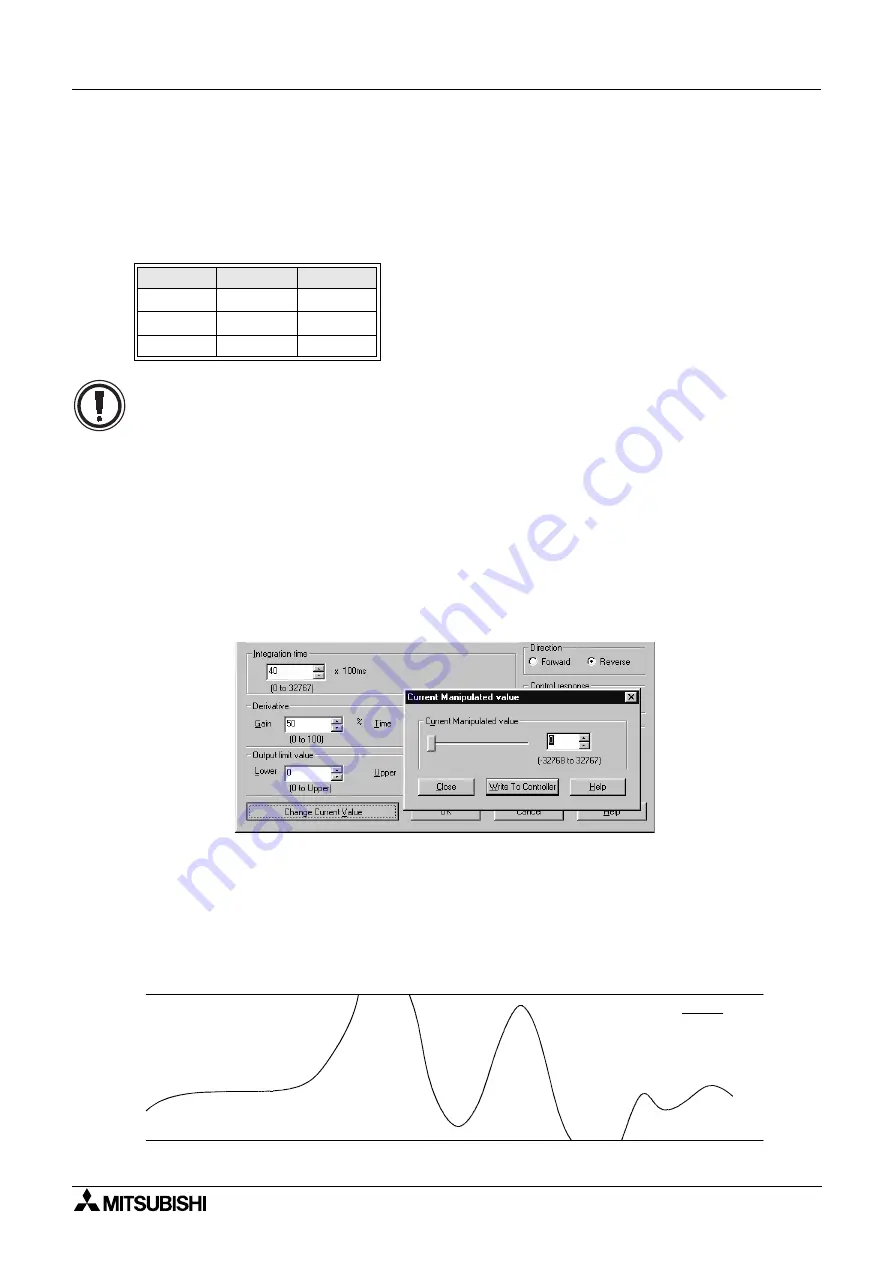
6.22.4 Limiting the Manipulated Value
The PID function block dialog box contains an area for setting upper (ULV) and lower limits
(LLV) for the output, or the MV. Possible LLVs range from 0 to the ULV and possible ULVs range
from the LLV to 4000.
Figure 6.22d. MV with Upper and Lower Limits
Response
α
αα
α
ββββ
FAST
100%
100%
NORMAL
40%
135%
SLOW
0%
100%
Upper Limit
MV
Lower Limit







































































