





























α
2 Simple Application Controllers
Function Blocks 6
6 - 60
6.22.5 Setting K
P
, T
I
, and T
D
with Auto-tuning
Auto-tuning can automatically calculate and set the K
P
, T
I
, and T
D
control parameters,
eliminating the need for the user to set them manually. Auto-tuning measures and uses the
characteristic responses of the system to determine the parameter settings for the PID function
block. See the Timing Diagrams above for correct usage.
The output, or MV, is driven to its upper limit value until the PV reaches the SV (plus the AT
bias, if there is one), then it is driven to zero until the PV reaches the SV again. This is
repeated several times.
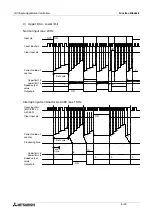
Figure 6.22e. Auto-tuning for Direction type, Reverse (default).
Figure 6.22f. Auto-tuning for Direction type, Direct.
The figures above indicate the behavior of the MV and the PV for a Reverse Direction example
system and a Direct Direction example system. During Auto-tuning, the MV is driven to its
upper limit value and to its lower limit value periodically and the response of the PV is
monitored. The controller then calculates the parameters, K
P
, T
I
, and T
D
, from the behavior of
the PV over time.
PV
time/s
MV
a
ULV
τ
on
Set value
Set value + AT bias*
* In this case AT bias is positive
τ
PV
time/s
MV
a
ULV
on
Set value
Set value + AT bias*
* In this case AT bias is negative
τ
τ







































































