




























α
2 Simple Application Controllers
Function Blocks 6
6 - 61
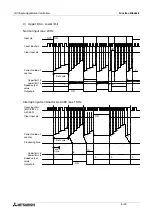
The controller then records the way that the PV behaves and derives the correct parameter
using the Ziegler and Nichols formulas below. See Figures 6.22e and 6.22f for the definintions
of a,
τ
and
τ
on.
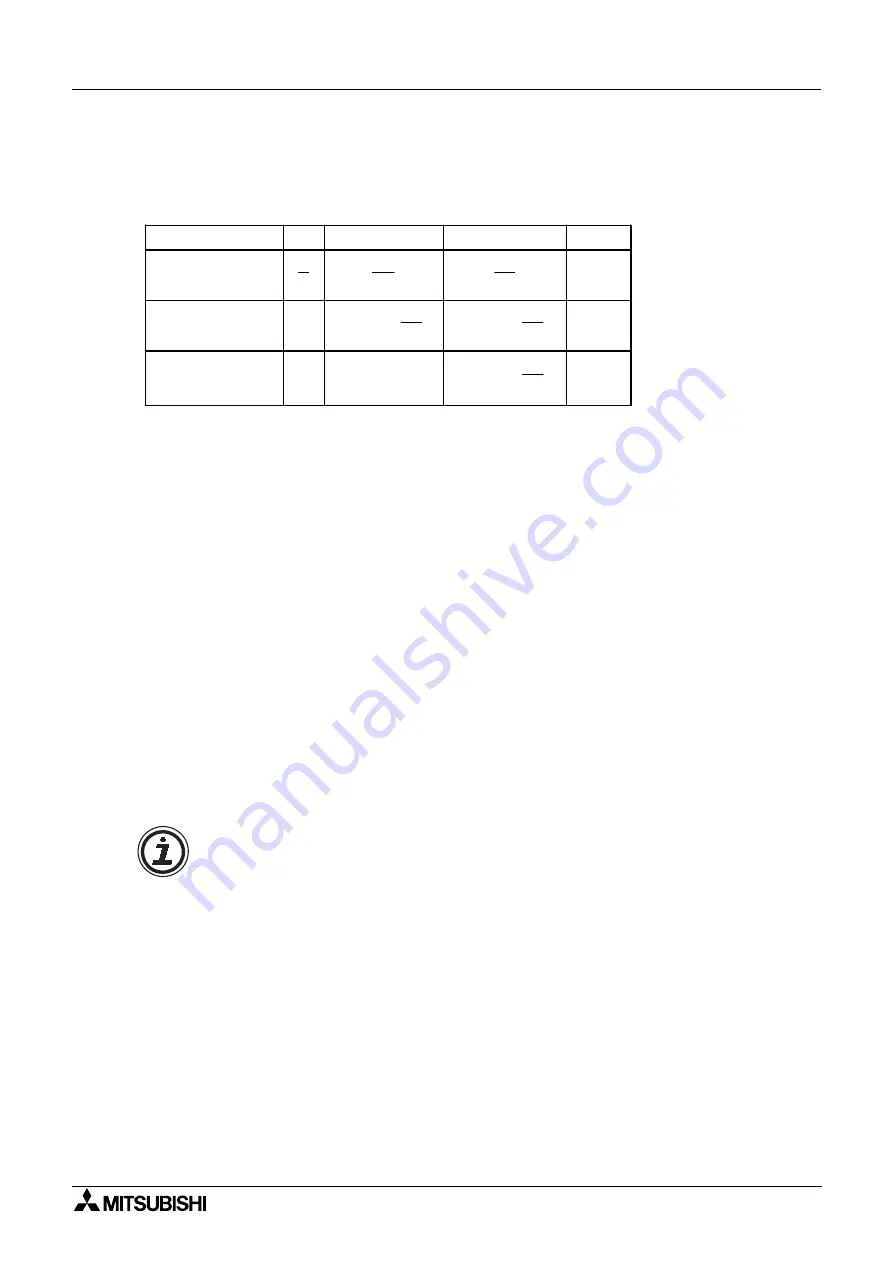
Table 6.29: The Ziegler and Nichols formulas
See figures 6.22e and 6.22f for the definitions of
a
,
τ
and
τ
on.
Consequently, if the system is moderately linear, the Auto-tuned parameters will be sufficient to
control the PV if the SV is changed. Auto-tuning will not need to be performed again.
The following parameters should be adjusted before starting the Auto-tuning:
• Direction of operation (to ensure that MV drives PV in the correct direction)
• Set Value (Changes during Auto-tuning are not effective.)
• Sample Time (Must be larger than the maximum system scan time!)
• Noise filter
• Desired control characteristic after Auto-tuning (P-, PI- or PID-control)
• Output Upper and Lower limit values
• AT bias
The following parameters may also be set before Auto-tuning, but they do not influence the
process:
• Derivative gain
• Control Response type (fast, normal, slow)
Note concer ning the VLS Programming Language: Upon the completion of
Auto-Tuning, the program in the controller will be updated with the new PID
parameters. If VLS was monitoring the controller before the Auto-Tuning function was
started, monitoring will STOP, a message box will appear and VLS will return to the
Editing mode. The updated program must be uploaded to the PC to begin monitoring
again.
6.22.6 PID Troubleshooting
For some systems, the Parameter values derived from the Auto-tuning process will be less
than optimal. If Auto-Tuning derives such parameter values, the user should refer to the
descriptions above for each relevant parameter (K
P
, T
I
, and T
D
) or see the following guide to
adjust these parameters.
Response when K
P
is decreased:
The PV rises slowly, stabilizes slowly with no overshoot.
P
PI
PID
Unit
Proportional gain K
P
a
1
a
0.9
a
1.2
1
Integration time T
I
0
)
1
(
33
on
on
!
!
!
"
)
1
(
20
on
on
!
!
!
"
100 ms
Derivate time T
D
0 0
#
$
%
&
'
( "
!
!
!
on
on
1
50
10 ms







































































