


























1-3
1
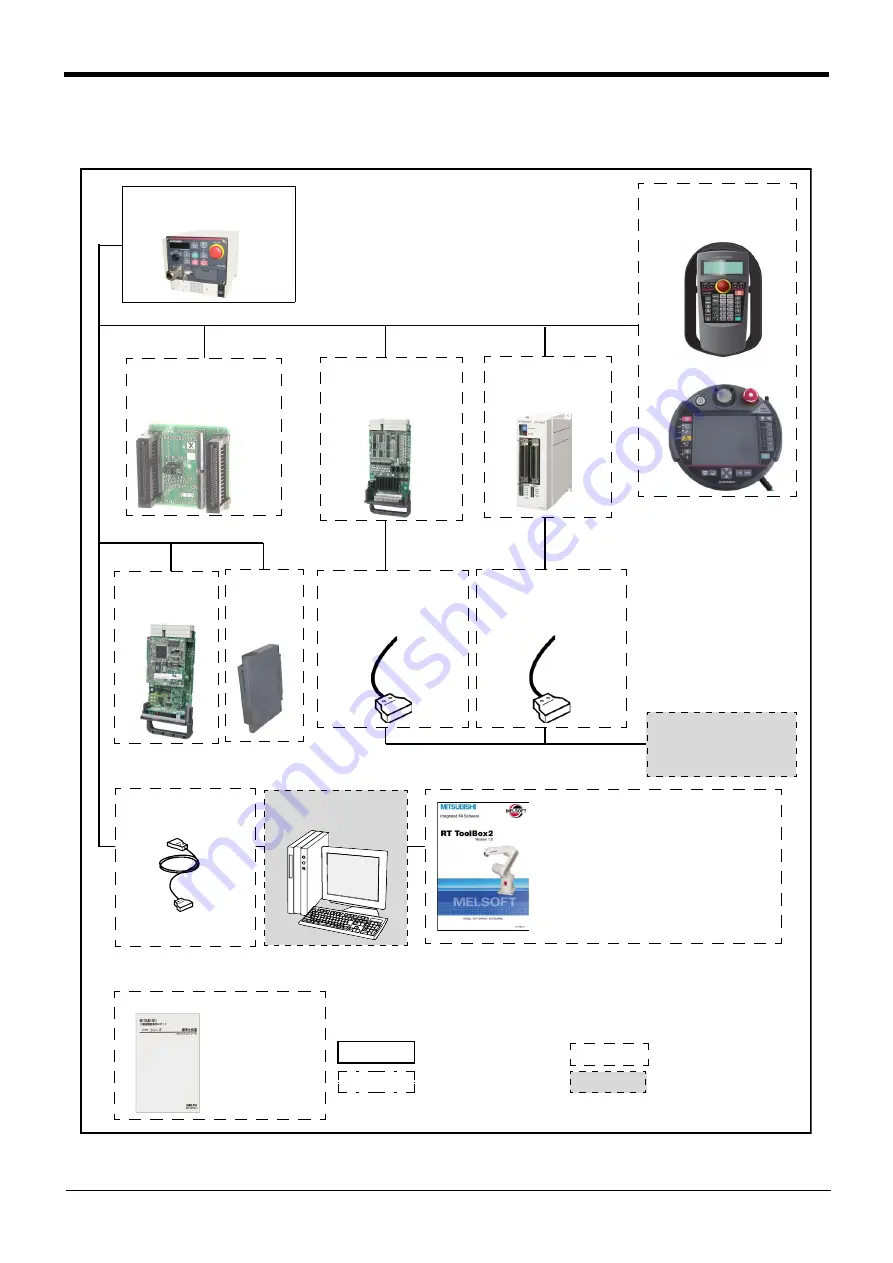
General configuration
1.3.2 Controller
The devices shown below can be installed on the controller.
The controllers that can be connected differ depending on the specification of the robot.
Fig.1-2 : Structural equipment
Pneumatic hand interface
2A-RZ365(Sink)/
2A-RZ375(Source)
*1)
Personal computer
Prepared by customer
Standard configuration
Options
Prepared by customer
[
Caution
]
The photograph is the image figure.
equipment
Special specifications
Instruction Manua l(printed)
・ 5S-AJ01-PE01
CC-Link
interface
2D-TZ576
Extension
memory
cassette
2D-TZ454
Parallel I/O unit
2A-RZ361
(Sink)
/
2A-RZ371
(Source)
External I/O cable
・ 2D-CBL05 (5m)
・ 2D-CBL15 (15m)
PLC(Programmable
Logic Controller)
External device
Prepared by customer
Teaching pendant
(T/B)
R32TB
R56TB
Parallel I/O
interface
2D-TZ368
(Sink)
/
2D-TZ378
(Source)
External I/O cable
・ 2A-CBL05 (5m)
・ 2A-CBL15 (15m)
Personal computer
cable:
2D-232CBL03M
(RS-232)
*) Refer to
Controller
CR1DA-700 series
RT Tool Box2
(MS-Windows2000/XP/Vista)
・ 3D-11C-WINJ(CD-ROM)
RT Tool Box2 mini
(MS-Windows2000/XP/Vista)
・ 3D-12C-WINJ(CD-ROM)
*1) Corresponding to the sink or
source to be used, setting of the
controller is necessary.
Summary of Contents for CR1DA-7A1-S15
Page 2: ......
Page 118: ......
Page 119: ......
Page 120: ......
Page 121: ......
Page 122: ......
Page 123: ......
Page 124: ......
Page 125: ......
Page 126: ......
Page 127: ......
Page 128: ......
Page 129: ......
Page 130: ......
Page 131: ......
Page 132: ......
Page 133: ......
Page 134: ......
Page 135: ......
Page 136: ......
Page 137: ......
Page 138: ......
Page 139: ......
Page 140: ......
Page 141: ......
Page 142: ......
Page 143: ......







































































