





























2 Robot arm
Tooling 2-18
2.5.2 Pneumatic piping in robot
1) Piping to supply air to the solenoid valves is not provided in the robot, so directly connect the primary piping
from the air supply source to the solenoid valve. (The primary pneumatic hose must be prepared by the
customer.)
2) The wrist section coupled axis is hollow, so air can be supplied to the end of the hand with the secondary
piping from the solenoid valve. (The secondary pneumatic hose and coupled axis section coupling must be
prepared by the customer.)
3) Up to four rows of solenoid valve sets (option) can be installed on the top of the robot arm.
2.5.3 Wiring of pneumatic hand output cable in robot
1) The pneumatic hand output cable can be used by installing the optional pneumatic hand interface on the
controller.
2) The hand output cable is wired from the connector PCB in the connector box to the top of the arm. The end
is bridged to the connector. (Connector name: "GR")
2.5.4 Wiring of hand check input cable in robot
1) The hand check input cable is wired from the connector PCB in the connector box to the top of the arm.
The end is bridged to the connector. (Connector name: "HC")
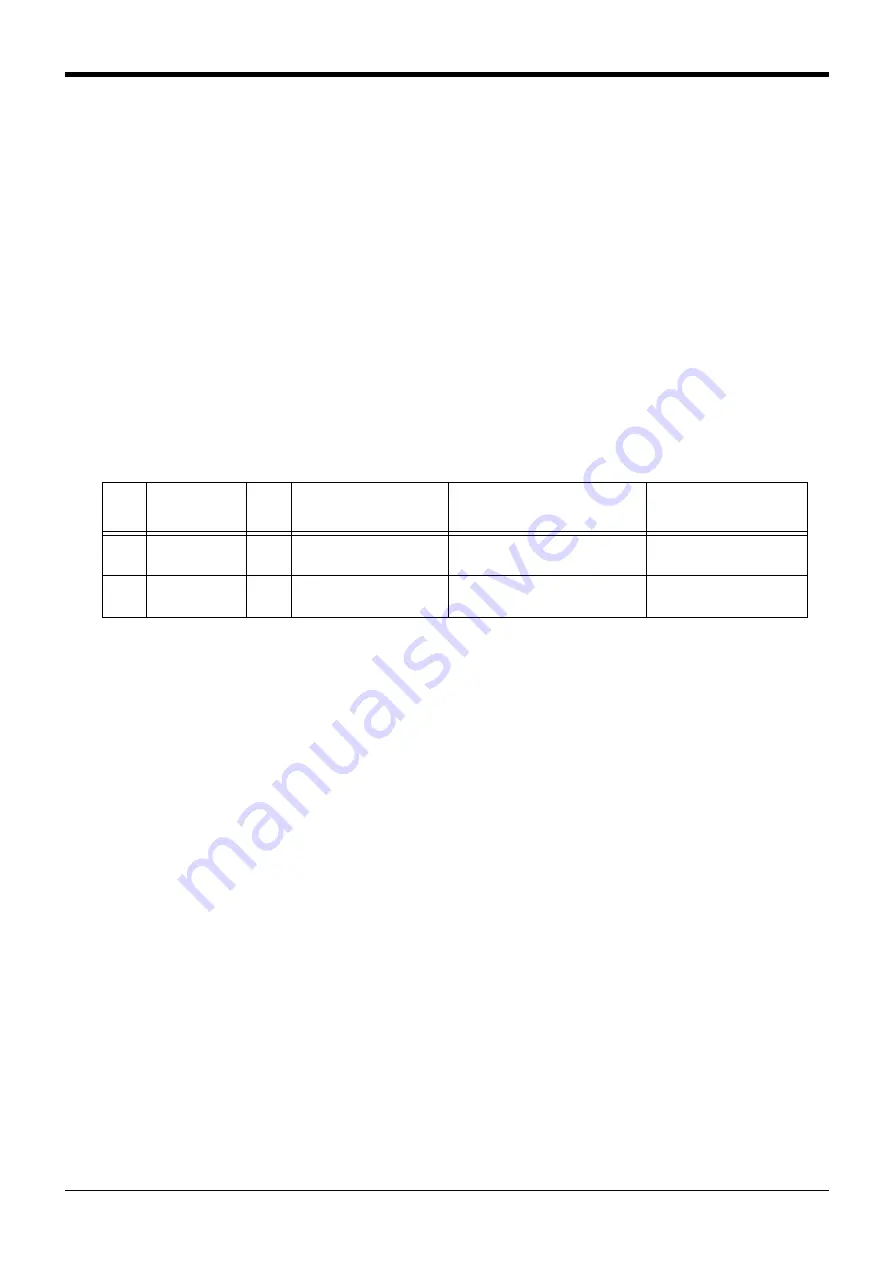
Table 2-2 : Wiring and piping for hand
No.
Parts name
Qty.
Robot side
(Robot arm side)
Counter side
(customer-prepared)
Manufacturer
1
Connector
1
SMP-10V-NC
SMR-10V-N
Japan sdderless yerminal
MFG. Co.,LTD
2
Connector
1
SMP-09V-BC
SMR-09V-B
Japan sdderless yerminal
MFG. Co.,LTD
Summary of Contents for CR1DA-7A1-S15
Page 2: ......
Page 118: ......
Page 119: ......
Page 120: ......
Page 121: ......
Page 122: ......
Page 123: ......
Page 124: ......
Page 125: ......
Page 126: ......
Page 127: ......
Page 128: ......
Page 129: ......
Page 130: ......
Page 131: ......
Page 132: ......
Page 133: ......
Page 134: ......
Page 135: ......
Page 136: ......
Page 137: ......
Page 138: ......
Page 139: ......
Page 140: ......
Page 141: ......
Page 142: ......
Page 143: ......



































































