





























2 Robot arm
Tooling 2-20
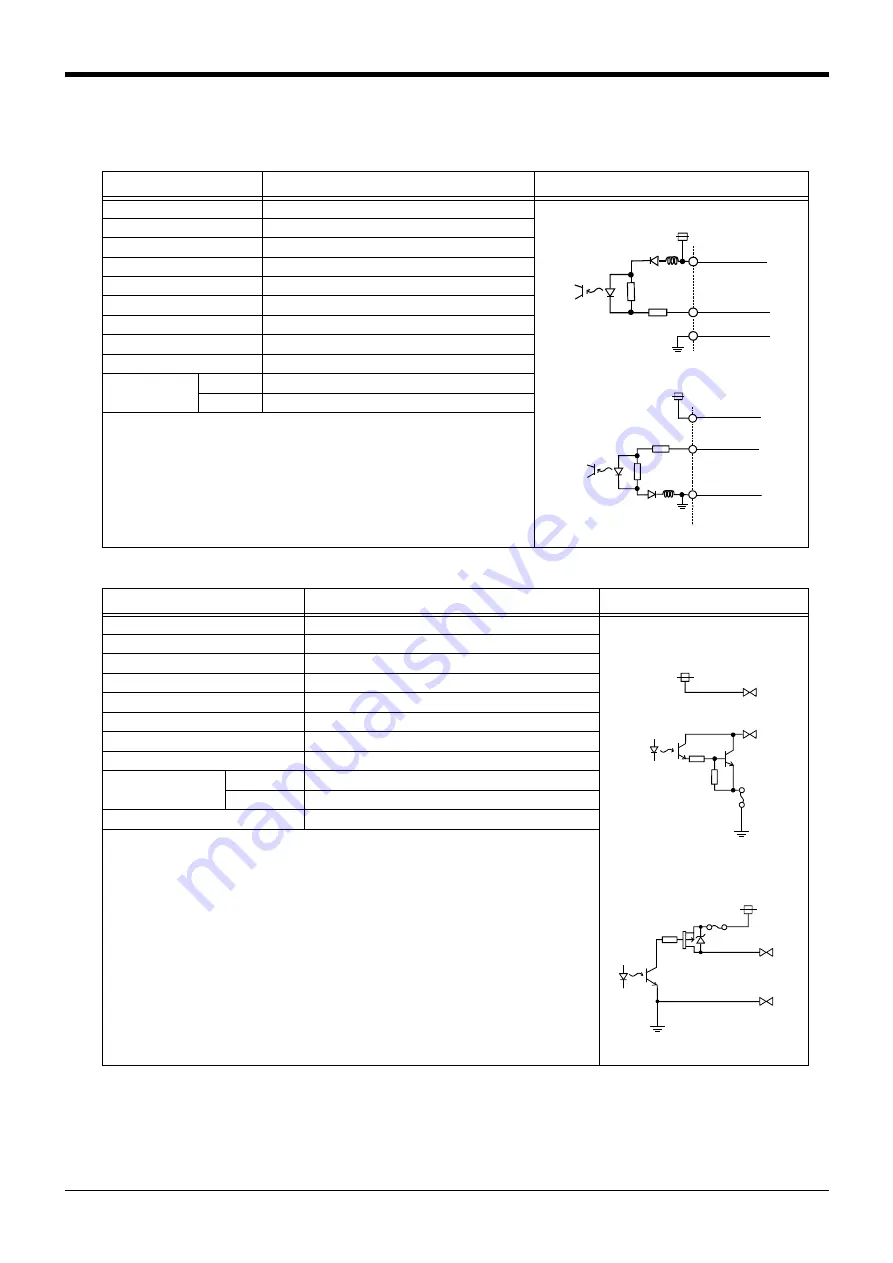
2.5.6 Electrical specifications of hand input/output
Table 2-3 : Electrical specifications of input circuit
Table 2-4 : Electrical specifications of output circuit
Note) An optional pneumatic hand interface (2A-RZ365/2A-RZ375) is required to use hand output.
Item
Specifications
Internal circuit
Type
DC input
<Sink type>
<Source type>
* HCn = HC1 ~ HC8
No. of input points
8
Insulation method
Photo-coupler insulation
Rated input voltage
12VDC/24VDC
Rated input current
Approx. 3mA/approx. 7mA
Working voltage range
DC10.2 to 26.4V(ripple rate within 5%)
ON voltage/ON current
8VDC or more/2mA or more
OFF voltage/OFF current
4VDC or less/1mA or less
Input resistance
Approx. 3.3kΩ
Response time
OFF-ON
10ms or less(DC24V)
ON-OFF
10ms or less(DC24V)
Item
Specification
Internal circuit
Type
Transistor output
<Sink type>
<Source type>
* GRn = GR1 ~ GR8
No. of output points
8
Insulation method
Photo coupler insulation
Rated load voltage
DC24V
Rated load voltage range
DC21.6 to 26.4VDC
Max. current load
0.1A/ 1 point (100%)
Current leak with power OFF
0.1mA or less
Maximum voltage drop with power ON DC0.9V(TYP.)
Response time
OFF-ON
2ms or less (hardware response time)
ON-OFF
2 ms or less (resistance load) (hardware response time)
Fuse rating
1.0A (each one common) Cannot be exchanged
3.3K
24V
0V(COM)
820
HCn*
24V
3.3K
820
24GND
+24V
HCn*
+24V
24V
(Internal power supply)
*
GRn
Fuse
1.0A
0V
Fuse
1.0A
*
GRn
+24V
24GND(COM)
Summary of Contents for CR1DA-7A1-S15
Page 2: ......
Page 118: ......
Page 119: ......
Page 120: ......
Page 121: ......
Page 122: ......
Page 123: ......
Page 124: ......
Page 125: ......
Page 126: ......
Page 127: ......
Page 128: ......
Page 129: ......
Page 130: ......
Page 131: ......
Page 132: ......
Page 133: ......
Page 134: ......
Page 135: ......
Page 136: ......
Page 137: ......
Page 138: ......
Page 139: ......
Page 140: ......
Page 141: ......
Page 142: ......
Page 143: ......







































































