





























31
BASIC OPERATION
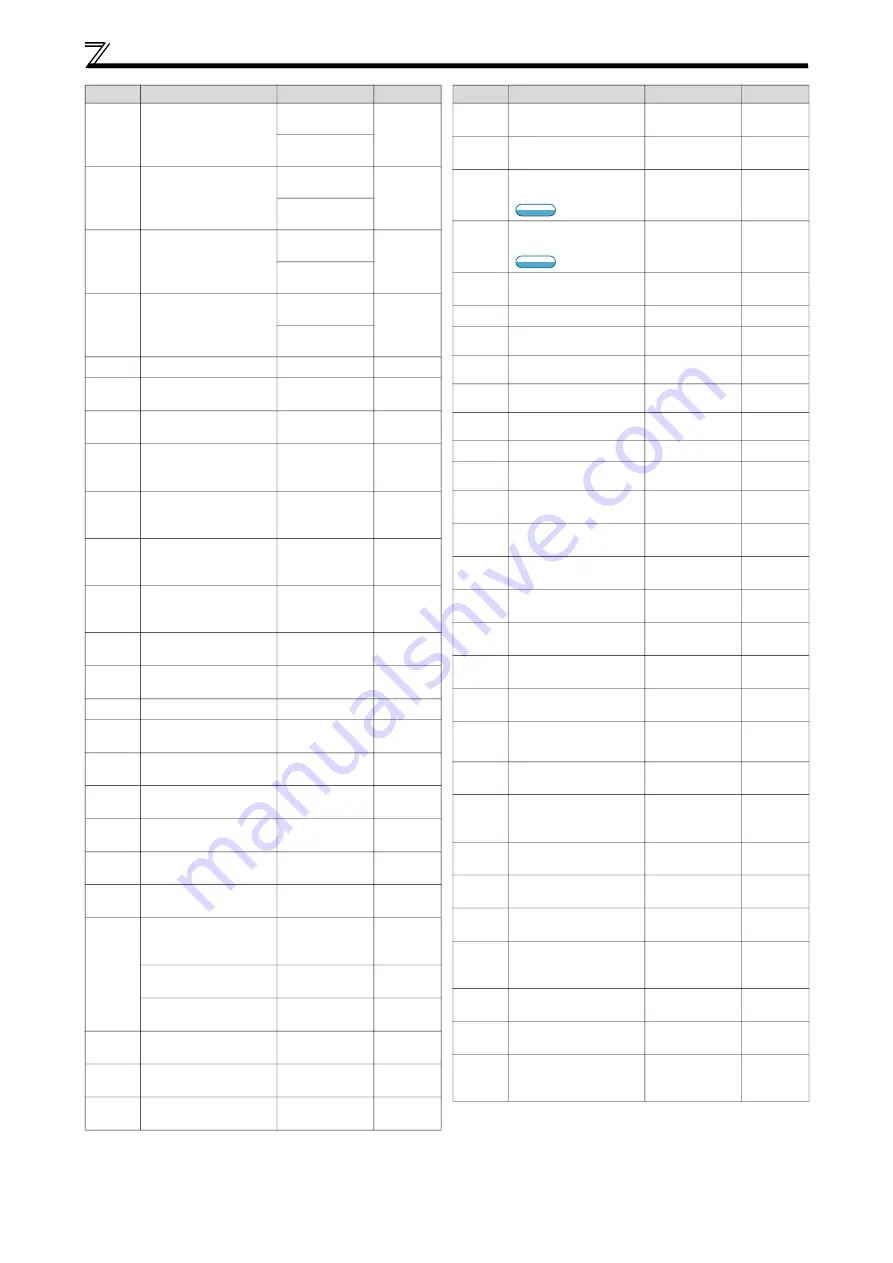
90
Motor constant (R1)
0 to 50
,
9999
*2
9999
0 to 400 m
,
9999
*3
91
Motor constant (R2)
0 to 50
,
9999
*2
9999
0 to 400 m
,
9999
*3
92
Motor constant (L1)
0 to 6000 mH,
9999
*2
9999
0 to 400 mH,
9999
*3
93
Motor constant (L2)
0 to 6000 mH,
9999
*2
9999
0 to 400 mH,
9999
*3
94
Motor constant (X)
0 to 100%, 9999
9999
95
Online auto tuning
selection
0 to 2
0
96
Auto tuning setting/
status
0, 1, 11, 101
0
100
Second acceleration
time for line speed
command
0 to 3600 s
15 s
101
Second deceleration
time for line speed
command
0 to 3600 s
15 s
102
Third acceleration
time for line speed
command
0 to 3600 s
15 s
103
Third deceleration
time for line speed
command
0 to 3600 s
15 s
110
Third acceleration/
deceleration time
0 to 3600 s, 9999
9999
111
Third deceleration
time
0 to 3600 s, 9999
9999
112
Third torque boost
0 to 30%, 9999
9999
113
Third V/F
(base frequency)
0 to 590 Hz, 9999
9999
114
Third stall prevention
operation level
0 to 400%
150%
115
Third stall prevention
operation frequency
0 to 590 Hz
0 Hz
116
Third output
frequency detection
0 to 590 Hz
60/50 Hz
*10
117
PU communication
station number
0 to 31
0
118
PU communication
speed
48, 96, 192, 384,
576, 768, 1152
192
119
PU communication
stop bit length /
data length
0, 1, 10, 11
1
PU communication
data length
0, 1
0
PU communication
stop bit length
0, 1
1
120
PU communication
parity check
0 to 2
2
121
Number of PU commu
-
nication retries
0 to 10, 9999
1
122
PU communication
check time interval
0, 0.1 to 999.8 s,
9999
9999
Parameter Name
Setting range
Initial value
123
PU communication
waiting time setting
0 to 150 ms, 9999
9999
124
PU communication CR/
LF selection
0 to 2
1
125
Terminal 2 frequency
setting gain frequency 0 to 590 Hz
60/50 Hz
*10
126
Terminal 4 frequency
setting gain frequency 0 to 590 Hz
60/50 Hz
*10
127
PID control automatic
switchover frequency 0 to 590 Hz, 9999
9999
128
PID action selection
0, 40, 41
0
129
PID proportional band 0.1 to 1000%,
9999
100%
130
PID integral time
0.1 to 3600 s,
9999
1 s
131
PID upper limit
400 to 600%,
9999
9999
132
PID lower limit
400 to 600%,
9999
9999
133
PID action set point
400 to 600%
500%
134
PID differential time
0.01 to 10.00 s,
9999
9999
135
Integral clamp
(positive polarity)
0 to 100%, 9999
9999
136
Integral clamp
(negative polarity)
0 to 100%, 9999
9999
137
PID upper/lower limit
hysteresis width
0 to 100%, 9999
9999
140
Backlash acceleration
stopping frequency
0 to 590 Hz
1 Hz
141
Backlash acceleration
stopping time
0 to 360 s
0.5 s
142
Backlash deceleration
stopping frequency
0 to 590 Hz
1 Hz
143
Backlash deceleration
stopping time
0 to 360 s
0.5 s
144
Speed setting
switchover
0, 2, 4, 6, 8, 10, 12,
102, 104, 106,
108, 110, 112
4
145
PU display language
selection
0 to 7
—
147
Acceleration/
deceleration time
switching frequency
0 to 590 Hz,
9999
9999
148
Stall prevention level
at 0V input
0 to 400%
150%
149
Stall prevention level
at 10 V input
0 to 400%
200%
150
Output current
detection level
0 to 400%
150%
151
Output current
detection signal delay
time
0 to 10 s
0 s
152
Zero current detection
level
0 to 400%
5%
153
Zero current detection
time
0 to 10 s
0.5 s
154
Voltage reduction
selection during stall
prevention operation
0, 1, 10, 11
1
Parameter Name
Setting range
Initial value
Simple
Simple
Simple
Simple
Simple
Simple
*2
The setting range or initial value for FR-A820-03160(55K)-R2R or lower and FR-A840-01800(55K)-R2R or lower
*3
The setting range or initial value for FR-A820-03800(75K)-R2R or higher and FR-A840-02160(75K)-R2R or higher
*10
Differs according to types. (FM type/CA type)







































































