




























207
Special operation and frequency control
4.20 Special operation and frequency control
4.20.1 PID control (Pr. 127 to Pr. 134, Pr. 575 to Pr. 577)
Purpose
Parameter that should be Set
Refer to Page
Perform process control such as
pump and air volume.
PID control
Pr. 127 to Pr. 134, Pr. 575
to Pr. 577
Dancer control
PID control (dancer control
setting)
Pr. 44, Pr. 45, Pr. 128 to Pr. 134
Traverse function
Traverse function
Pr. 592 to Pr. 597
Avoid overvoltage alarm due to
regeneration by automatic
adjustment of output frequency
Regeneration avoidance
function
Pr. 882, Pr. 883, Pr. 885, Pr. 886
The inverter can be used to exercise process control, e.g. flow rate, air volume or pressure.
The terminal 2 input signal or parameter setting is used as a set point and the terminal 4 input signal used as a
feedback value to constitute a feedback system for PID control.
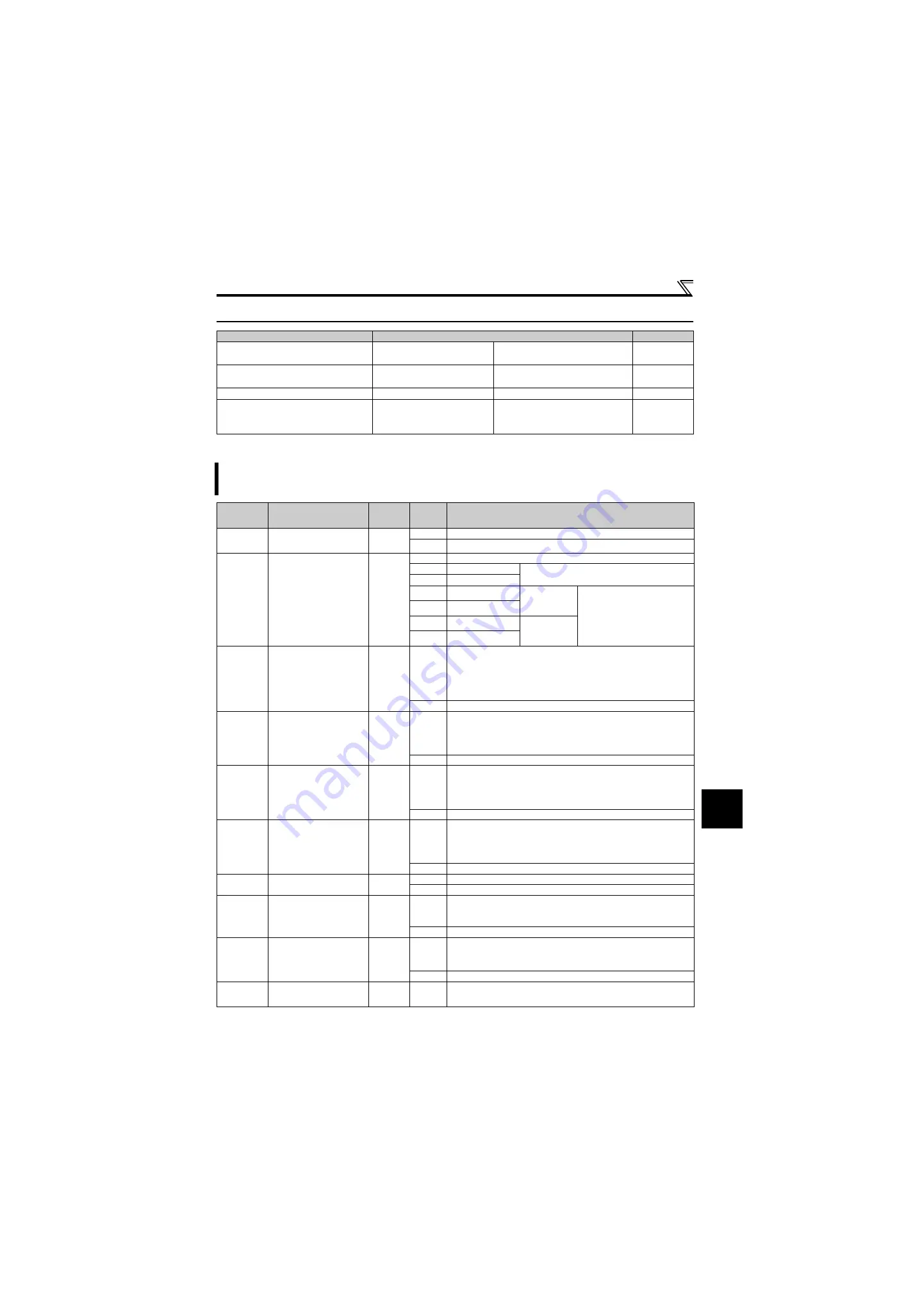
Parameter
Number
Name
Initial
Value
Setting
Range
Description
127
PID control automatic
switchover frequency
9999
0 to 400Hz Frequency at which the control is automatically changed to PID control.
9999
Without PID automatic switchover function
128
PID action selection
0
0
PID action is not performed
20
PID reverse action
Measured value (terminal 4)
Set value (terminal 2 or
Pr. 133
)
21
PID forward action
40
PID reverse action
Addition
method: fixed
For dancer control
set point
(Pr. 133)
,
measured value (terminal 4)
main speed (frequency command
of the operation mode)
41
PID forward action
42
PID reverse action
Addition
method: ratio
43
PID forward action
129
PID proportional band
100%
0.1 to
1000%
If the proportional band is narrow (parameter setting is small), the
manipulated variable varies greatly with a slight change of the
measured value. Hence, as the proportional band narrows, the
response sensitivity (gain) improves but the stability deteriorates, e.g.
hunting occurs. Gain Kp= 1/proportional band
9999
No proportional control
130
PID integral time
1s
0.1 to
3600s
For deviation step input, time (Ti) required for only the integral (I) action
to provide the same manipulated variable as that for the proportional (P)
action. As the integral time decreases, the set point is reached earlier
but hunting occurs more easily.
9999
No integral control.
131
PID upper limit
9999
0 to
100%
Maximum value
If the feedback value exceeds the setting, the FUP signal is output. The
maximum input (20mA/5V/10V) of the measured value (terminal 4) is
equivalent to 100%.
9999
No function
132
PID lower limit
9999
0 to
100%
Minimum frequency
If the process value falls below the setting range, the FDN signal is
output. The maximum input (20mA/5V/10V) of the measured value
(terminal 4) is equivalent to 100%.
9999
No function
133
PID action set point
9999
0 to 100% Used to set the set point for PID control.
9999
Terminal 2 input is the set point.
134
PID differential time
9999
0.01 to
10.00s
For deviation ramp input, time (Td) required for providing only the
manipulated variable for the proportional (P) action. As the differential
time increases, greater response is made to a deviation change.
9999
No differential control.
575
Output interruption
detection time
1s
0 to
3600s
The inverter stops operation if the output frequency after PID operation
remains at less than the
Pr. 576
setting for longer than the time set in
Pr.
575
.
9999
Without output interruption function
576
Output interruption
detection level
0Hz
0 to 400Hz
Set the frequency at which the output interruption processing is
performed.
Summary of Contents for FR-D700 Series
Page 11: ...VII MEMO ...
Page 23: ...12 MEMO ...
Page 57: ...46 MEMO ...
Page 262: ...258 MEMO ...
Page 276: ...272 MEMO ...
Page 287: ...283 MEMO ...
Page 289: ......







































































