





























15 - 70
15.6 Device Range that Can Be Set
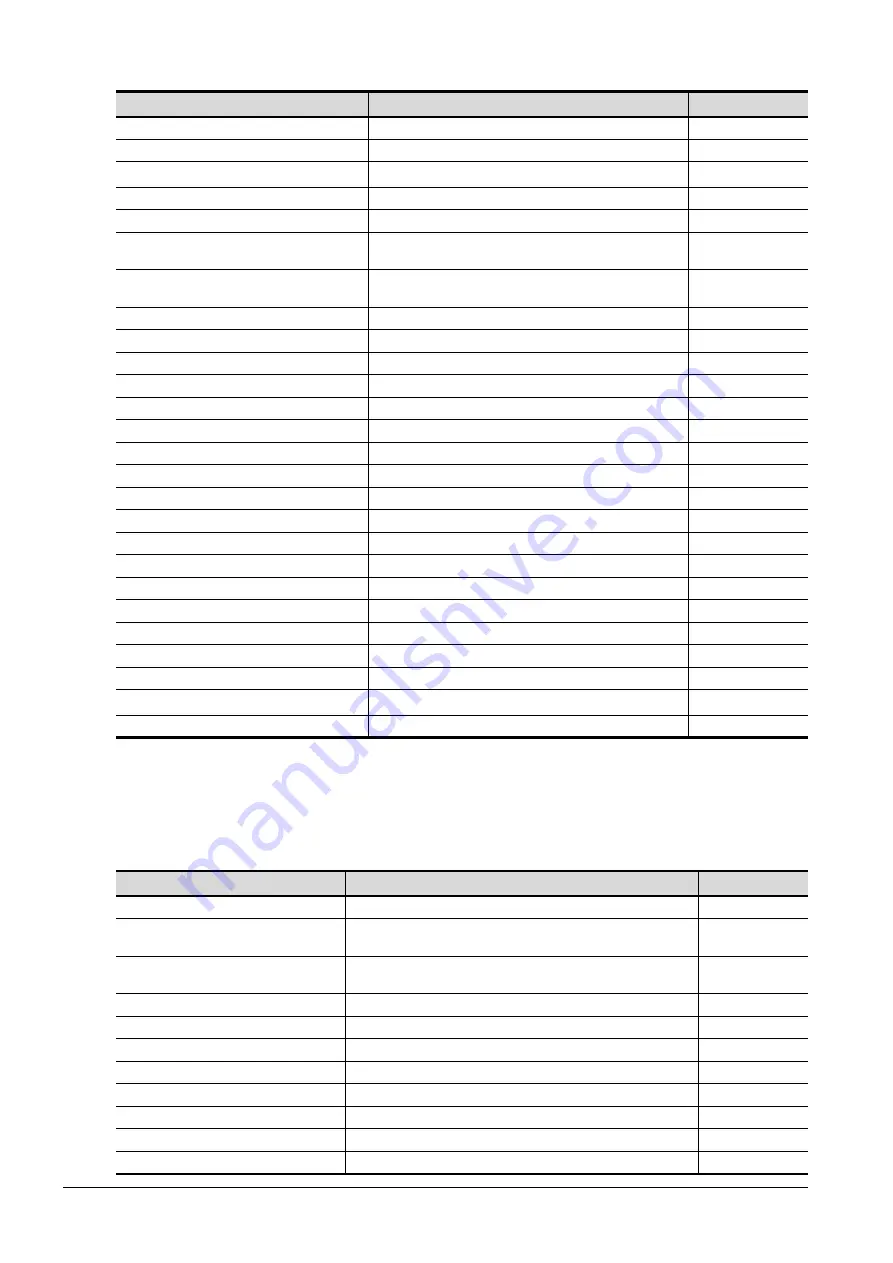
(5) Basic setting parameter
*1
For the parameters prefixed by an asterisk (*), setting becomes effective when the power is turned off once and back on after
setting the parameter data.
*2
MELSERVO-JE is equivalent to MELSERVO-J4.
However, they have differences in the parameter function.
For using the MELSERVO-JE series, refer to the following.
➠
MELSERVO-JE Series Servo Amplifier Instruction Manual
(6) Gain filter parameter
Device name
Item
Symbol
*1
PA1, PA1001
Operation mode
*STY
PA2, PA1002
Regenerative option
*REG
PA3, PA1003
*2
Absolute position detection system
*ABS
PA4, PA1004
Function selection A-1
*AOP1
PA5, PA1005
Number of command input pulses per revolution
*FBP
PA6, PA1006
Electronic gear numerator
(command pulse multiplication numerator)
CMX
PA7, PA1007
Electronic gear denominator
(command pulse multiplication denominator)
CDV
PA8, PA1008
Auto tuning mode
ATU
PA9, PA1009
Auto tuning response
RSP
PA10, PA1010
In-position range
INP
PA11, PA1011
Forward rotation torque limit
TLP
PA12, PA1012
Reverse rotation torque limit
TLN
PA13, PA1013
Command pulse input form
*PLSS
PA14, PA1014
Rotation direction selection
*POL
PA15, PA1015
Encoder output pulses
*ENR
PA16, PA1016
Encoder output pulses 2
*ENR2
PA17 to 18, PA1017 to 1018
For manufacturer setting
―
PA19, PA1019
Parameter writing inhibit
*BLK
PA20, PA1020
Tough drive setting
*TDS
PA21, PA1021
Function selection A-3
*AOP3
PA22, PA1022
For manufacturer setting
―
PA23, PA1023
Drive recorder arbitrary alarm trigger setting
DRAT
PA24, PA1024
Function selection A-4
*AOP4
PA25, PA1025
One-touch tuning - Overshoot permissible level
OTHOV
PA26, PA1026
*2
Function selection A-5
*AOP5
PA27 to 32, PA1027 to 1032
For manufacturer setting
―
Device name
Item
Symbol
*1
PB1, PB1001
Adaptive tuning mode (adaptive filter II)
PB1
PB2, PB1002
Vibration suppression control tuning mode (advanced vibration
suppression control II)
VRFT
PB3, PB1003
Position command acceleration/deceleration time constant (position
smoothing)
PST
PB4, PB1004
Feed forward gain
FFC
PB5, PB1005
For manufacturer setting
―
PB6, PB1006
Load to motor inertia ratio
GD2
PB7, PB1007
Model loop gain
PG1
PB8, PB1008
Position loop gain
PG2
PB9, PB1009
Speed loop gain
VG2
PB10, PB1010
Speed integral compensation
VIC
PB11, PB1011
Speed differential compensation
VDC
Summary of Contents for GOT2000 Series
Page 2: ......
Page 84: ......
Page 432: ...6 58 6 6 Precautions ...
Page 578: ...9 54 9 6 Precautions ...
Page 726: ...12 84 12 5 Precautions ...
Page 756: ......
Page 822: ...14 66 14 4 Device Range that Can Be Set ...
Page 918: ...15 96 15 7 Precautions ...
Page 930: ...16 12 16 6 Precautions ...
Page 964: ......
Page 1002: ...19 38 19 7 Precautions ...
Page 1022: ...20 20 20 5 Precautions ...
Page 1023: ...MULTI CHANNEL FUNCTION 21 MULTI CHANNEL FUNCTION 21 1 ...
Page 1024: ......
Page 1054: ...21 30 21 5 Multi channel Function Check Sheet ...
Page 1055: ...FA TRANSPARENT FUNCTION 22 FA TRANSPARENT FUNCTION 22 1 ...
Page 1056: ......
Page 1223: ......







































































