




















Appendix
A
−
5
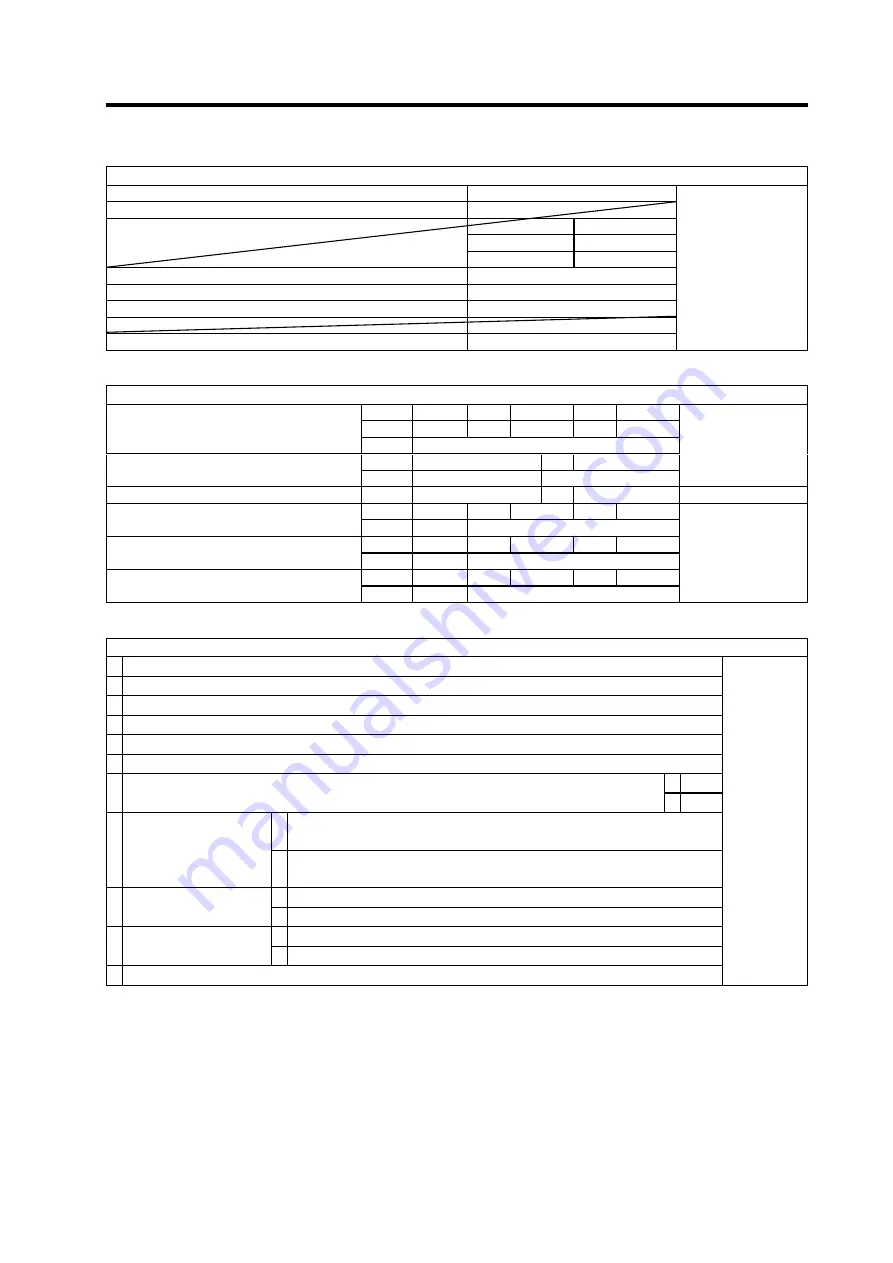
3. System specifications/model
Spindle drive unit model
MDS-A/B-SPJ2 -
Power supply unit model
MDS-A-C -
MDS-A-SP -
MDS-A-V -
Drive unit model connected to same converter
MDS-A-V -
MDS-A-V -
MDS-A-V -
MDS-A-V -
Circle an item or fill
Magnesensor model
BKO-
in numerical value
Encoder model (Including C axis)
Resistor model
FCUA-RB
R-UNIT -
ACL model for power supply unit
A-AL BKO-NC6851H
ACL model for motor
BKO-
4. Electrical specifications
Max. motor speed RPM
3450
4500
4600
[Speed during max. command (10V)]
6000
8000
10000
Circle an item or fill
Special
RPM (per 10RPM) in numerical value
Zero speed detection
50RPM
25RPM
Special
RPM
1 to 1000 (per 1RPM)
Load meter output
10V (at 120%)
3V (at 120%)
Circle one item
Acceleration/deceleration time constant
0.3S
3S
5S
Special
S
20 to 32760ms (per 10ms)
Torque limit
10%
30%
50%
Circle an item or fill
Special
%
0 to 120% (per 1%)
in numerical value
Speed detection range (% to max. speed)
10%
30%
50%
Special
%
0 to 100% (per 1%)
5. Additional specifications
No additional specifications
Magnesensor orientation (1-point orientation)
Encoder (1024 pulse) multi-point orientation
Encoder (1024 pulse) multi-point indexing orientation
Motor built-in encoder multi-point orientation
Motor built-in encoder multi-point indexing orientation
Motor built-in encoder pulse output
1-fold
Drive unit pulse output in regard to No. of motor built-in encoder pulses
2-fold Circle the all
1-amplifier
Spindle motor + spindle motor
(fill sub-side specifications on following pages)
relevant items
2-motor changeover
Spindle motor + general purpose motor
(fill sub-side specifications in Section 8.)
High-speed
synchronous
According to encoder (1024 pulses)
tapping
According to motor built-in encoder
Spindle
synchronization
According to encoder (1024 pulses)
According to motor built-in encoder
Contour control (C axis control)







































































