







3. Functions
3
−
1
3. Functions
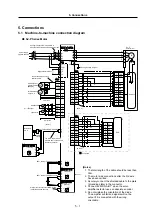
3.1 Control input signals
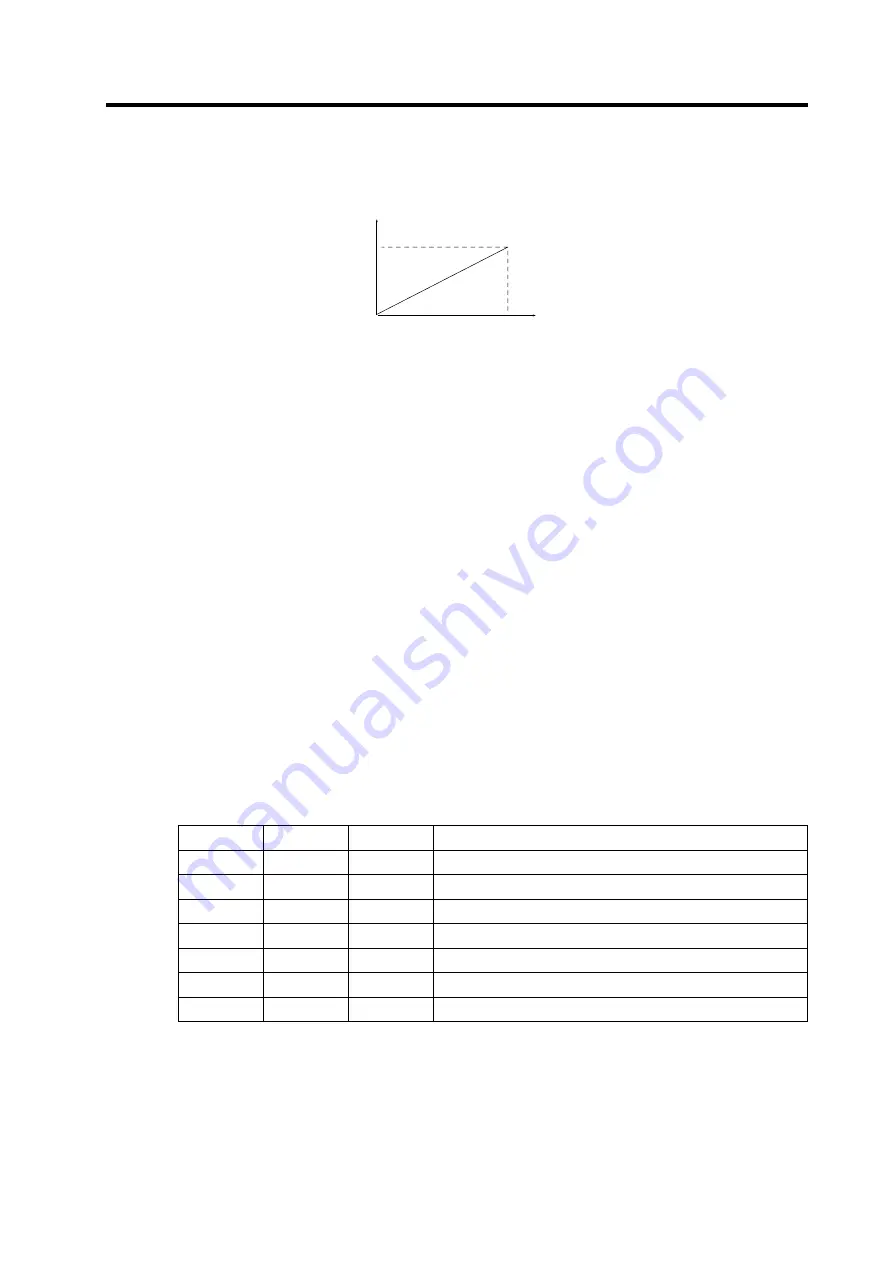
Max. speed
r/min
MAX
Speed command value
0
(1) Speed command input
1) When the speed command value is 0, the motor speed becomes 0. When the speed
command value is the maximum value, the motor will rotate at the maximum motor speed set
with parameter SP017 (TSP).
2) The motor will run in forward or reverse according to the forward run and reverse run signals.
(The motor will not rotate with just the speed command value.)
(2) Forward run command input (SRN) 1)
1) When SRN is ON, the motor will rotate in the counterclockwise direction (CCW) looking from
the motor shaft according to the commanded speed.
2) When SRN is OFF, the motor will decelerate to a stop, and the transistor base will be shut off.
3) When an orientation command is input, the orientation will have the priority.
(3) Reverse run command input (SRI) 1)
1) When SRI is ON, the motor will rotate in the clockwise direction (CW) looking from the motor
shaft according to the commanded speed.
2) When SRI is OFF, the motor will decelerate to a stop, and the transistor base will be shut off.
3) When an orientation command is input, the orientation will have the priority.
(4) Torque limit 1, 2 and 3 input (TL1, TL2 and TL3)
1) The torque limit temporarily reduces the motor's output torque during mechanical spindle
orientation or gear shifting, and rotates the motor.
2) The following seven torque limit values can be used according to the combination of TL1, TL2
and TL3 bit inputs.
TL3 TL2 TL1
Torque
limit
value
0
0
1
Torque limit value (%) set with parameter SP021
0
1
0
Torque limit value (%) set with parameter SP049
0
1
1
Torque limit value (%) set with parameter SP050
1
0
0
Torque limit value (%) set with parameter SP051
1
0
1
Torque limit value (%) set with parameter SP052
1
1
0
Torque limit value (%) set with parameter SP053
1
1
1
Torque limit value (%) set with parameter SP054
Note)
% indicates the percentage to the motor short time rated torque.