




























3. Functions
3
−
3
3.2 Control output signals
(1) Zero speed output (ZS)
1) ZS turns ON when the actual motor speed drops below the zero detection point in respect to
the stop command.
2) The ZS signal is output when the above conditions are satisfied regardless of the speed
command (SRN, SRI).
3) The minimum output width for this signal is approx. 200 ms.
4) The zero speed detection speed can be set in the range of 0 to 1000 rpm using parameter
SP018 (ZSP).
Motor speed
Zero speed detection point 0 to 1000 rpm set with parameter
(Standard: 50 rpm, semi-standard : 25 rpm)
Zero speed output
signal (ZS)
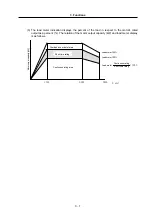
(2) Speed reached output (US)
1) USO turns ON when the actual motor speed in respect to the commanded speed reaches
±15%.
Forward run (reverse run)
start command (SRN)
Speed reached output
signal (US)
Command speed
Detection width
2) The USO signal will not be output unless the SRN or SRI signal is ON.
3) The USO signal can be used as a confirmation signal in respect to the forward run (M03) and
reverse run (M04) command. This signal turns OFF when the start command signal is turned
OFF.
4) When the reverse run command turns ON, the motor will start to decelerate and the USO
signal will turn OFF. When it is confirmed that the speed reached signal has turned ON again,
the reverse run command will be completed.







































































