



























MDS-E/EH Series Instruction Manual
5 Servo Adjustment
282
IB-1501229-F
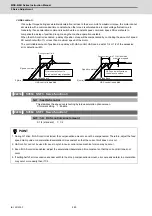
(1) Measuring unbalance torque and frictional torque
Machine unbalance torque and frictional torque measurements are required before the LMC compensation can be
set. However, the horizontal axis unbalance torque is necessarily "0".
Carry out the reciprocating operation (approx. F1000) with the measured axis, and the load current % value during
constant-speed feed is measured at the NC servo monitor screen. The unbalance torque and frictional torque at
that time are expressed by the following formulas.
The measurement values are not used for LMC compensation type 3. However, since they are used for other
controls, set them to the following parameters.
【
#2232
】
SV032 TOF Torque offset
Set the unbalance torque on vertical axis and inclined axis.
When the vertical axis pull up function is enabled, the pull up compensation direction is determined
by this parameter's sign. When set to "0", and the pull up function is enabled (SV033/bitE=1), the
alarm "S02 2233 Initial parameter error" occurs.
This can be used for speed loop delay compensation and collision detection function.
To use load inertia estimation function (drive monitor display), set this parameter, friction torque
(SV045) and load inertia display enabling flag(SV035/bitF).
Related parameters: SV007, SV033/bitE, SV059
---Setting range---
-100 to 100 (Stall current %)
【
#2245
】
SV045 TRUB Friction torque
Set the frictional torque when using the collision detection function.
To use load inertia estimation function (drive monitor display), set this parameter, imbalance torque
(SV032) and load inertia display enabling flag (SV035/bitF).
---Setting range---
0 to 255 (Stall current %)
Unbalance torque (%) =
(+ feed load current %) + (- feed load current %)
2
Frictional torque (%) =
| (+ feed load current %) - (- feed load current %) |
2
Assume that the load current % was -55% in the + direction and -25% in the - direction
when JOG feed was carried out at approx. F1000. The unbalance torque and frictional
torque are as shown below.
Unbalance torque (%) =
(-55) + (-25)
2
= -40%
(Example)
Friction torque (%)
=
(-55) - (-25)
2
= 15%
Summary of Contents for MDS-E
Page 1: ......
Page 3: ......
Page 15: ......
Page 17: ......
Page 19: ......
Page 21: ......
Page 31: ......
Page 32: ...1 IB 1501229 F 1 Installation ...
Page 76: ...45 IB 1501229 F 2 Wiring and Connection ...
Page 132: ...101 IB 1501229 F 3 Safety Function ...
Page 142: ...111 IB 1501229 F 4 Setup ...
Page 277: ...MDS E EH Series Instruction Manual 4 Setup 246 IB 1501229 F ...
Page 278: ...247 IB 1501229 F 5 Servo Adjustment ...
Page 351: ...MDS E EH Series Instruction Manual 5 Servo Adjustment 320 IB 1501229 F ...
Page 352: ...321 IB 1501229 F 6 Spindle Adjustment ...
Page 404: ...373 IB 1501229 F 7 Troubleshooting ...
Page 455: ...MDS E EH Series Instruction Manual 7 Troubleshooting 424 IB 1501229 F ...
Page 456: ...425 IB 1501229 F 8 Maintenance ...
Page 475: ...MDS E EH Series Instruction Manual 8 Maintenance 444 IB 1501229 F ...
Page 476: ...445 IB 1501229 F 9 Power Backup System ...
Page 494: ...463 IB 1501229 F 10 Appx 1 Cable and Connector Assembly ...
Page 504: ...473 IB 1501229 F 11 Appx 2 D A Output Specifications for Drive Unit ...
Page 514: ...483 IB 1501229 F 12 Appx 3 Protection Function ...
Page 523: ...MDS E EH Series Instruction Manual 12 Appx 3 Protection Function 492 IB 1501229 F ...
Page 524: ...493 IB 1501229 F 13 Appx 4 Compliance to EC Directives ...
Page 528: ...497 IB 1501229 F 14 Appx 5 EMC Installation Guidelines ...
Page 540: ...509 IB 1501229 F 15 Appx 6 Higher Harmonic Suppression Measure Guidelines ...
Page 550: ......
Page 554: ......







































































