



















MDS-E/EH Series Instruction Manual
5 Servo Adjustment
287
IB-1501229-F
【
#2231
】
SV031 OVS1 Overshooting compensation 1
This compensates the motor torque when overshooting occurs during positioning. This is valid only
when the overshooting compensation (SV027/bitB,A) is selected.
Type 3 SV027/bitB,A = 11
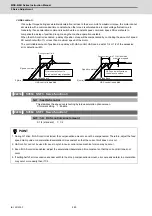
Set the compensation amount based on the motor stall current. Observing positioning droop
waveform, increase in increments of 1% and find the value where overshooting does not occur.
To vary compensation amount depending on the direction.
When SV042 (OVS2) is "0", change the SV031 (OVS1) value in both of the +/-directions to
compensate.
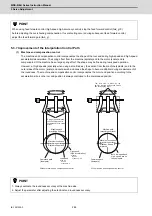
To vary the compensation amount depending on the command direction, set this and SV042
(OVS2).
(SV031: + direction, SV042: - direction. However, the directions may be opposite depending on
other settings.)
When "-1" is set, the compensation will not be performed in the direction of the command.
---Setting range---
-1 to 100 (Stall current %)
Note that the range will be "-1 - 10000" (Stall current 0.01%) when SV082/bit2 is "1".
【
#2242
】
SV042 OVS2 Overshooting compensation 2
Set this with SV031 (OVS1) only when you wish to vary the overshooting compensation amount
depending on the command directions.
Normally, set to "0".
---Setting range---
-1 to 100 (Stall current %)
Note that when SV082/bit2 is "1", the setting range is between -1 and 10000 (Stall current
0.01%).
【
#2227
】
SV027 SSF1 Servo function 1
bit B-A : ovs Overshooting compensation
Set this if overshooting occurs during positioning.
bitB,A=
00: Compensation stop
01: Setting prohibited
10: Setting prohibited
11: Type 3
Set the compensation amount in SV031(OVS1) and SV042(OVS2).
【
#2234
】
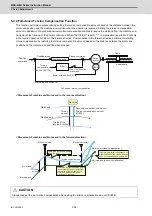
SV034 SSF3 Servo function 3
bit F-C: ovsn Overshooting compensation type 3 Non-sensitive band
Set the non-sensitive band of the model position droop overshooting amount in increments of 2
μ
m.
In the feed forward control, set the non-sensitive band of the model position droop and ignore the
overshooting of the model.
0 : 0
μ
m, 1: 2
μ
m, 2: 4
μ
m,---, E : 28
μ
m, F: 30
μ
m
【
#2282
】
SV082 SSF5 Servo function 5
bit 2 : ccu Lost motion overshoot compensation compensation amount setting
increment
0: Stall current % 1: Stall current 0.01%
Summary of Contents for MDS-E
Page 1: ......
Page 3: ......
Page 15: ......
Page 17: ......
Page 19: ......
Page 21: ......
Page 31: ......
Page 32: ...1 IB 1501229 F 1 Installation ...
Page 76: ...45 IB 1501229 F 2 Wiring and Connection ...
Page 132: ...101 IB 1501229 F 3 Safety Function ...
Page 142: ...111 IB 1501229 F 4 Setup ...
Page 277: ...MDS E EH Series Instruction Manual 4 Setup 246 IB 1501229 F ...
Page 278: ...247 IB 1501229 F 5 Servo Adjustment ...
Page 351: ...MDS E EH Series Instruction Manual 5 Servo Adjustment 320 IB 1501229 F ...
Page 352: ...321 IB 1501229 F 6 Spindle Adjustment ...
Page 404: ...373 IB 1501229 F 7 Troubleshooting ...
Page 455: ...MDS E EH Series Instruction Manual 7 Troubleshooting 424 IB 1501229 F ...
Page 456: ...425 IB 1501229 F 8 Maintenance ...
Page 475: ...MDS E EH Series Instruction Manual 8 Maintenance 444 IB 1501229 F ...
Page 476: ...445 IB 1501229 F 9 Power Backup System ...
Page 494: ...463 IB 1501229 F 10 Appx 1 Cable and Connector Assembly ...
Page 504: ...473 IB 1501229 F 11 Appx 2 D A Output Specifications for Drive Unit ...
Page 514: ...483 IB 1501229 F 12 Appx 3 Protection Function ...
Page 523: ...MDS E EH Series Instruction Manual 12 Appx 3 Protection Function 492 IB 1501229 F ...
Page 524: ...493 IB 1501229 F 13 Appx 4 Compliance to EC Directives ...
Page 528: ...497 IB 1501229 F 14 Appx 5 EMC Installation Guidelines ...
Page 540: ...509 IB 1501229 F 15 Appx 6 Higher Harmonic Suppression Measure Guidelines ...
Page 550: ......
Page 554: ......