





























7. Servo Parameters
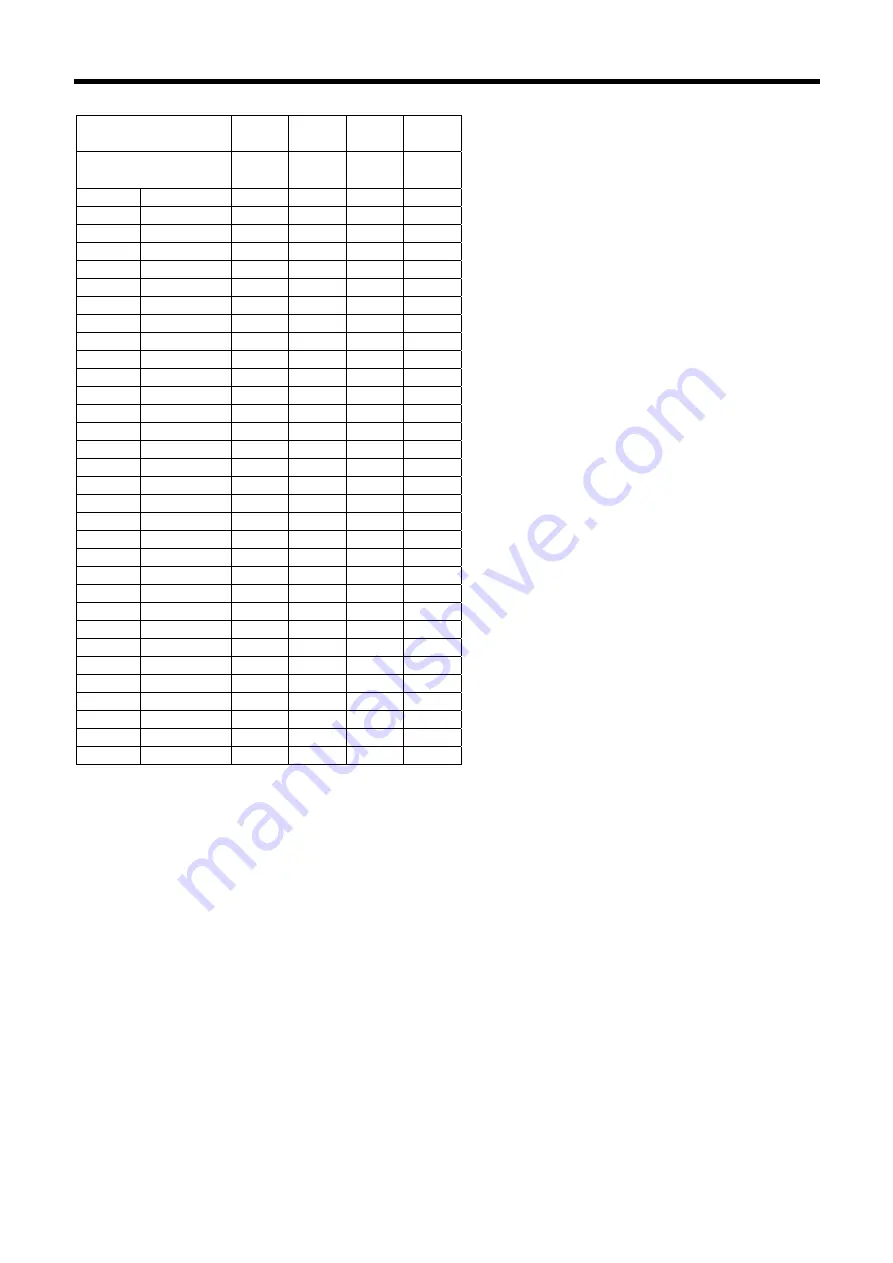
7.2 MDS-C1-Vx High-gain (MDS-B-Vx4 Compatible)
II - 163
Motor
HC
103R
HC
153R
HC
203R
HC
353R
Drive unit
capacity
10 10 20 35
SV001 PC1
-
-
-
-
SV002 PC2
-
-
-
-
SV003 PGN1
33
33
33
33
SV004 PGN2
0
0
0
0
SV005 VGN1
15
15
20
40
SV006 VGN2
0
0
0
0
SV007 VIL
0
0
0
0
SV008 VIA
1364 1364 1364
1364
SV009 IQA
4096 4096 4096
4096
SV010 IDA
4096 4096 4096
4096
SV011 IQG
256 256 256
256
SV012 IDG
512 512 512
512
SV013 ILMT
500 500 500
500
SV014 ILMTsp
500 500 500
500
SV015 FFC
0
0
0
0
SV016 LMC1
0
0
0
0
SV017 SPEC
0000 0000 0000
0000
SV018 PIT
-
-
-
-
SV019 RNG1
-
-
-
-
SV020 RNG2
-
-
-
-
SV021 OLT
60
60
60
60
SV022 OLL
150 150 150
150
SV023 OD1
6
6
6
6
SV024 INP
50
50
50
50
SV025 MTYP
xxE1 xxE2 xxE3
xxE4
SV026 OD2
6
6
6
6
SV027 SSF1
4000 4000 4000
4000
SV028
0
0
0
0
SV029 VCS
0
0
0
0
SV030 IVC
0
0
0
0
SV031 OVS1
0
0
0
0
SV032 TOF
0
0
0
0
Summary of Contents for MELDAS 60 Series
Page 1: ......
Page 2: ......
Page 4: ......
Page 6: ......
Page 10: ......
Page 13: ...I EXPLANATION OF ALARMS ...
Page 14: ......
Page 95: ...II EXPLANATION OF PARAMETERS ...
Page 96: ......
Page 443: ......







































































