




























Chapter 10 Adjustment
10–24
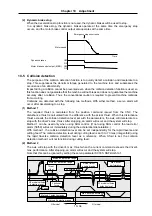
(3) Inductive voltage compensation
The current loop response is improved by compensating the back electromotive force element
induced by the motor feedrate. This improved the current command efficiency, and allows the
acceleration/deceleration time constant to the shortened.
<Adjustment method>
1) While accelerating/decelerating at rapid traverse, adjust the inductive voltage compensation
gain (SV047:EC) so that the current FB peak is a few % smaller than the current command
peak.
Inductive voltage compensation
No.
Abbrev.
Parameter name
Unit
Explanation
Setting range
SV047 EC Inductive
voltage
compensation gain
%
Set 100% as a standard. Lower the gain if the current FB peak
exceeds the current command peak.
0 to 200
POINT
If the current FB peak becomes larger than the current command peak (over
compensation), an overcurrent (alarm 3A) will occur easily. Note that over
compensation will occur easily if the movable mass is large.
0
0
120
200
–200
–120
Speed
command
(mm/min)
Current
command
(Rated current %)
No inductive voltage
compensation
With inductive
voltage
compensation
Time
Time







































































