





























Chapter 10 Adjustment
10–27
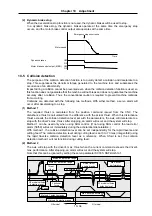
Tbd
EMGrt
EMGrt
>
Tbd
0
EMGt
EMGx
Emergency stop
Brake operation
Tbd: Brake operation delay time
Servo ON
Detect in-position
and turn servo OFF
Motor speed
Deceleration command
Emergency stop
Brake operation
Servo ON
Tbd
Tbd: Brake operation delay time
Rapid traverse
speed
Drop prevention function sequence for emergency stop
Deceleration stop function sequence for emergency stop
Speed command







































































