

















Chapter 10 Adjustment
10–36
No.
Abbrev.
Parameter name
Unit
Explanation
Setting range
SV032
TOF
Thrust offset
Stall %
(rated
current %)
Set the unbalance thrust amount of an axis having an
unbalanced thrust, such as a vertical axis, as a percentage
(%) in respect to the stall rated current.
–100 to 100
SV045 TRUB Current
compensation/
frictional force
Stall %
(rated
current %)
When using the collision detection function, set the frictional
force as a percentage in respect to the stall rated current.
The low-order 8 bits are used.
Set 0 when not using the collision detection function.
0 to 100
SV059 TCNV Estimated
thrust
gain
When using the collision detection function, set the estimated
thrust gain.
When SV035:SSFS4/clt is set to 1, the setting value guide will
display at MPOF on the Servo Monitor screen.
Set 0 when not using the collision detection function.
0 to 32767
SV060 TLMT G0
collision
detection level
Stall %
(rated
current %)
When using the collision detection function, set the collision
detection level for the method G0 modal as a percentage in
respect to the stall rated current.
Set 0 when not using the collision detection function.
0 to 100
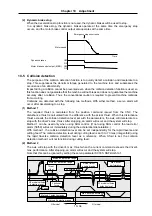
POINT
1. Even when validated, this function does not guarantee that the machine will
not break and does not guarantee the machine accuracy after a collision.
Thus, the conventional caution must be taken during machine operation to
prevent accidents.
2. If the collision detection limit is set at the extreme limit, an incorrect
detection may be made even in the normal state. Thus, set the collision
detection level to a slightly larger value.
3. After adjusting the machine or replacing the motor or detector replaced
during maintenance, adjust the collision detection related parameters again.
4. If the detector resolution has been changed due to replacement of the
detector, or when the position control system has been changed (changed
between the closed loop or semi-closed loop, etc.), the SV059: TCNV
estimated thrust gain must be changed.