





















Chapter 10 Adjustment
10–40
Name Abbrev.
Details
Setting range
(unit)
SV017 SPEC
Servo specifications
HEX setting
SV018
PIT
Set the pole pitch.
1 to 32767
(mm)
SV019 RNG1 Set the resolution per pole pitch of the detector used for position control.
1 to 9999
(kp/PIT)
SV020 RNG2 Set the resolution per pole pitch of the detector used for speed control.
1 to 9999
(kp/PIT)
SV021
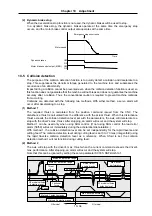
OLT
Set the detection time constant for overload 1 (OL1)
Normally, set 60.
1 to 300
(s)
SV022
OLL
Set the current detection level of overload 1 (OL1) as a percentage (%) in respect to the stall
rated current.
Normally, set 150.
1 to 500
(Stall rated
current %)
SV023
OD1
Set the excessive error detection width for servo ON.
Setting method
SV023:OD1 = SV026:OD2 = SV053:OD3 =
F / ( 60 × PGN1 )
×
0.5
F
: Max. rapid traverse speed (mm/min)
PGN1 : Position loop gain 1 (rad/s)
When 0 is set, the excessive error will not be
detected at servo ON.
0 to 32767
(mm)
SV024
INP
Set the in-position detection width.
Normally, set 50.
0 to 32767
(µm)
F E D C B A 9 8 7 6 5 4 3 2 1 0
spm drvall
drvup
mpt3
mp
abs
vmh
vdir
fdir
seqh
dfbx
vdir2
bit
Name
Meaning when "0" is set
Meaning when "1" is set
0
vdir2
Sub side (CN3 connector) feedback
forward polarity
Sub side (CN3 connector) feedback
reverse polarity
1
dfbx
Not used for linear motor.
Set to "0".
2
seqh
READY/servo ON time, normal mode
READY/servo ON time, time reduction
mode
3
Set to "0".
4
fdir
Main side (CN2 connector) feedback
forward polarity
Main side (CN2 connector) feedback
reverse polarity
5
vdir
Set to "0".
6
vmh
Normal processing mode
High-speed processing mode
∗
For the linear system, set the
high-speed processing mode.
7
abs
Incremental position detection
Absolute position detection
8 mp
9 mpt3
Not used for linear motor.
Set to "0".
A
drvup
Combination with standard motor driver Set when using a combination with a
driver having a capacity one rank
above or below the standard motor
drive.
B
drvall
Normal setting
Set when using a combination of driver
having a capacity different from the
standard motor driver.
C
D
E
F
spm
Special motor selection
Standard linear motor : 6
Special linear motor : 7
Refer to 9-2-1 (5) List of motor types.
OD1